 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimulation-to-Reality domain adaptation for offline 3D object annotation on pointclouds with correlation alignment
Paper and Code
Feb 06, 2022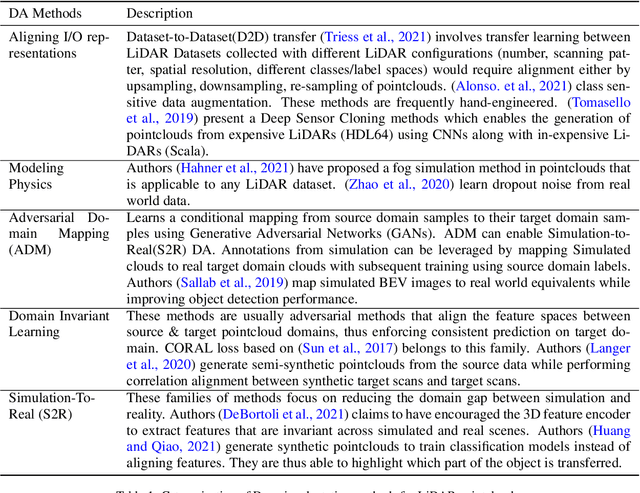
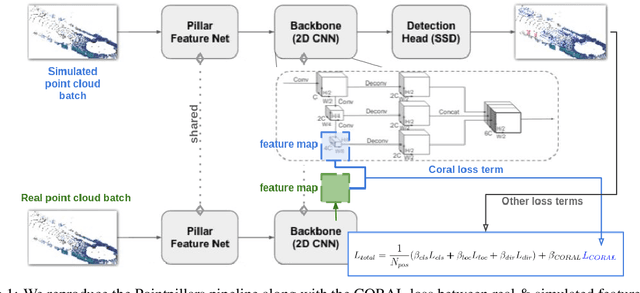
Annotating objects with 3D bounding boxes in LiDAR pointclouds is a costly human driven process in an autonomous driving perception system. In this paper, we present a method to semi-automatically annotate real-world pointclouds collected by deployment vehicles using simulated data. We train a 3D object detector model on labeled simulated data from CARLA jointly with real world pointclouds from our target vehicle. The supervised object detection loss is augmented with a CORAL loss term to reduce the distance between labeled simulated and unlabeled real pointcloud feature representations. The goal here is to learn representations that are invariant to simulated (labeled) and real-world (unlabeled) target domains. We also provide an updated survey on domain adaptation methods for pointclouds.