 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSIGVerse: A cloud-based VR platform for research on social and embodied human-robot interaction
Paper and Code
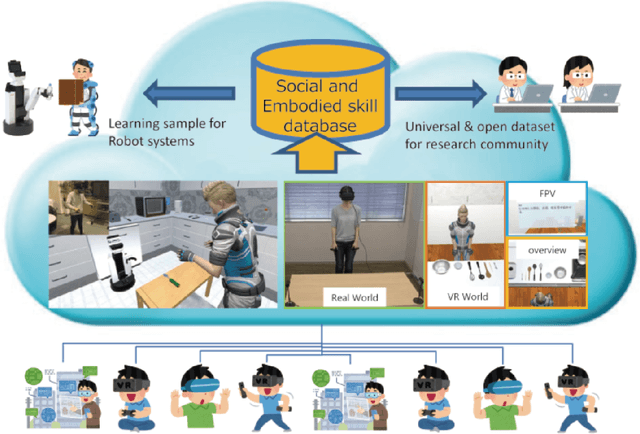

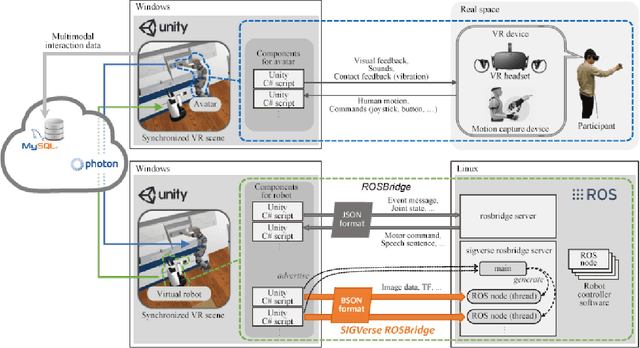

Common sense and social interaction related to daily-life environments are considerably important for autonomous robots, which support human activities. One of the practical approaches for acquiring such social interaction skills and semantic information as common sense in human activity is the application of recent machine learning techniques. Although recent machine learning techniques have been successful in realizing automatic manipulation and driving tasks, it is difficult to use these techniques in applications that require human-robot interaction experience. Humans have to perform several times over a long term to show embodied and social interaction behaviors to robots or learning systems. To address this problem, we propose a cloud-based immersive virtual reality (VR) platform which enables virtual human-robot interaction to collect the social and embodied knowledge of human activities in a variety of situations. To realize the flexible and reusable system, we develop a real-time bridging mechanism between ROS and Unity, which is one of the standard platforms for developing VR applications. We apply the proposed system to a robot competition field named RoboCup@Home to confirm the feasibility of the system in a realistic human-robot interaction scenario. Through demonstration experiments at the competition, we show the usefulness and potential of the system for the development and evaluation of social intelligence through human-robot interaction. The proposed VR platform enables robot systems to collect social experiences with several users in a short time. The platform also contributes in providing a dataset of social behaviors, which would be a key aspect for intelligent service robots to acquire social interaction skills based on machine learning techniques.