 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSIFT Matching by Context Exposed
Paper and Code
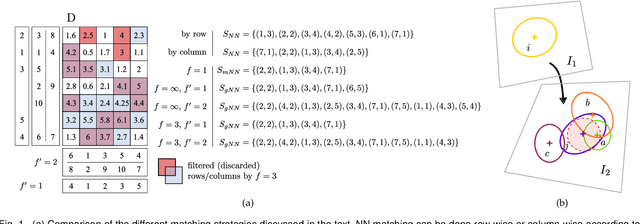



This paper investigates how to step up local image descriptor matching by exploiting matching context information. Two main contexts are identified, originated respectively from the descriptor space and from the keypoint space. The former is generally used to design the actual matching strategy while the latter to filter matches according to the local spatial consistency. On this basis, a new matching strategy and a novel local spatial filter, named respectively blob matching and Delaunay Triangulation Matching (DTM) are devised. Blob matching provides a general matching framework by merging together several strategies, including pre-filtering as well as many-to-many and symmetric matching, enabling to achieve a global improvement upon each individual strategy. DTM alternates between Delaunay triangulation contractions and expansions to figure out and adjust keypoint neighborhood consistency. Experimental evaluation shows that DTM is comparable or better than the state-of-the-art in terms of matching accuracy and robustness, especially for non-planar scenes. Evaluation is carried out according to a new benchmark devised for analyzing the matching pipeline in terms of correct correspondences on both planar and non-planar scenes, including state-of-the-art methods as well as the common SIFT matching approach for reference. This evaluation can be of assistance for future research in this field.