 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShapeAug++: More Realistic Shape Augmentation for Event Data
Paper and Code
Sep 17, 2024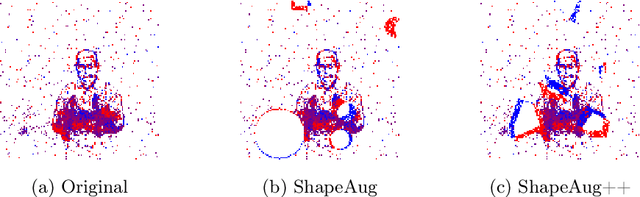
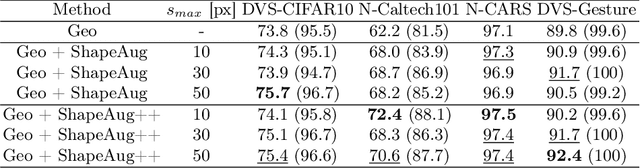
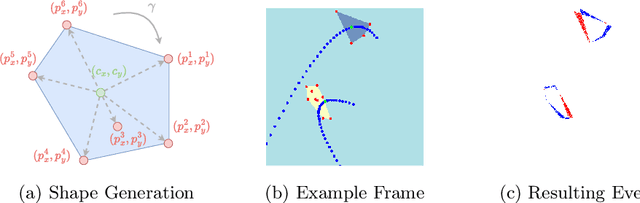
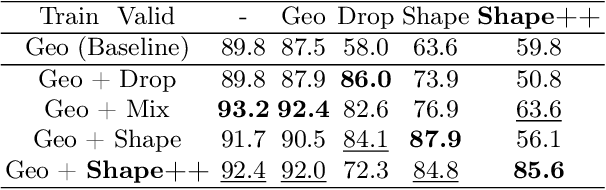
The novel Dynamic Vision Sensors (DVSs) gained a great amount of attention recently as they are superior compared to RGB cameras in terms of latency, dynamic range and energy consumption. This is particularly of interest for autonomous applications since event cameras are able to alleviate motion blur and allow for night vision. One challenge in real-world autonomous settings is occlusion where foreground objects hinder the view on traffic participants in the background. The ShapeAug method addresses this problem by using simulated events resulting from objects moving on linear paths for event data augmentation. However, the shapes and movements lack complexity, making the simulation fail to resemble the behavior of objects in the real world. Therefore in this paper, we propose ShapeAug++, an extended version of ShapeAug which involves randomly generated polygons as well as curved movements. We show the superiority of our method on multiple DVS classification datasets, improving the top-1 accuracy by up to 3.7% compared to ShapeAug.