 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeShape-adaptive Hysteresis Compensation for Tendon-driven Continuum Manipulators
Paper and Code
Sep 14, 2021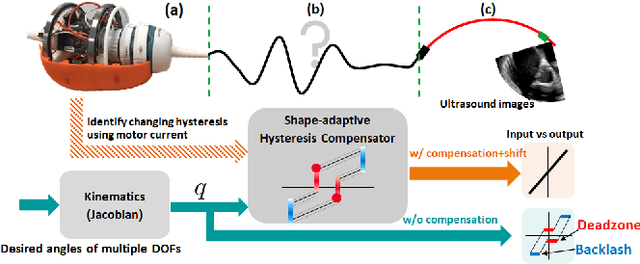
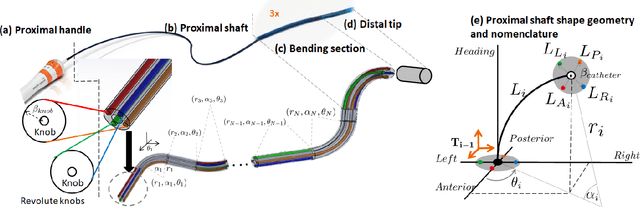


Tendon-driven continuum manipulators (TDCM) are commonly used in minimally invasive surgical systems due to their long, thin, flexible structure that is compliant in narrow or tortuous environments. There exist many researches for precise tip control of the articulating section. However, these models do not account for the proximal shaft shape of TDCM, affecting the tip controls in practical settings. In this paper, we propose a gradient-based shift detection method based on motor current that can easily find the offset of task space models (i.e., hysteresis). We analyze our proposed methods with multiple Intra-cardiac Echocardiography catheters, which are typical commercial example of TDCM. Our results show that the errors from varied proximal shape are considerably reduced, and the accuracy of the tip manipulation is improved when changing external environmental structures.