 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSetting Up Pepper For Autonomous Navigation And Personalized Interaction With Users
Paper and Code
Apr 16, 2017
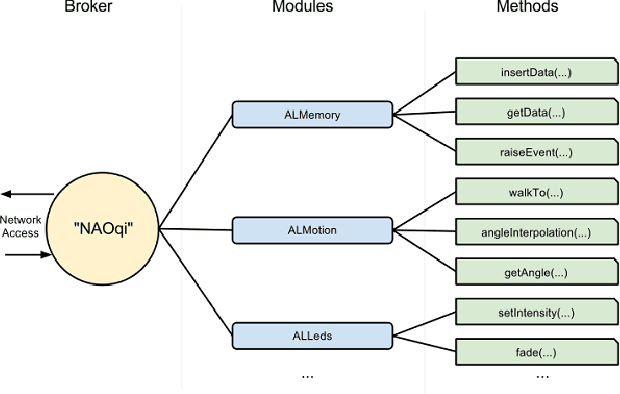
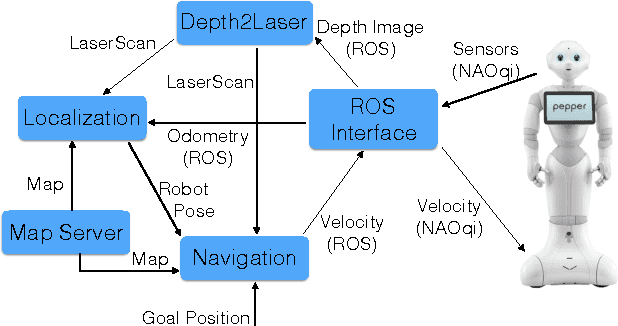
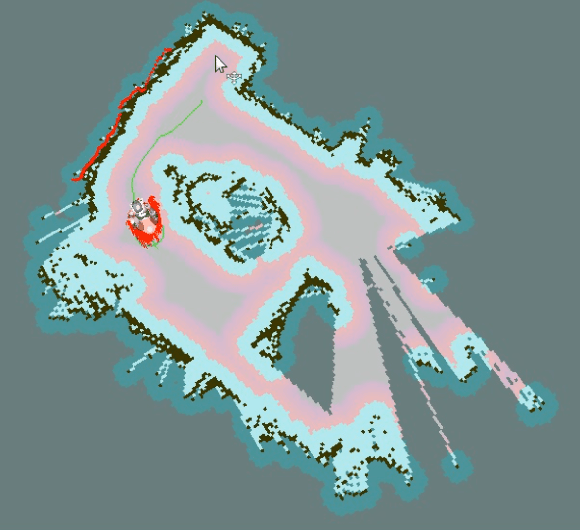
In this paper we present our work with the Pepper robot, a service robot from SoftBank Robotics. We had two main goals in this work: improving the autonomy of this robot by increasing its awareness of the environment; and enhance the robot ability to interact with its users. To achieve this goals, we used ROS, a modern open-source framework for developing robotics software, to provide Pepper with state of the art localization and navigation capabilities. Furthermore, we contribute an architecture for effective human interaction based on cloud services. Our architecture improves Pepper speech recognition capabilities by connecting it to the IBM Bluemix Speech Recognition service and enable the robot to recognize its user via an in-house face recognition web-service. We show examples of our successful integration of ROS and IBM services with Pepper's own software. As a result, we were able to make Pepper move autonomously in a environment with humans and obstacles. We were also able to have Pepper execute spoken commands from known users as well as newly introduced users that were enrolled in the robot list of trusted users via a multi-modal interface.