 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelf-Growing Spatial Graph Network for Context-Aware Pedestrian Trajectory Prediction
Paper and Code
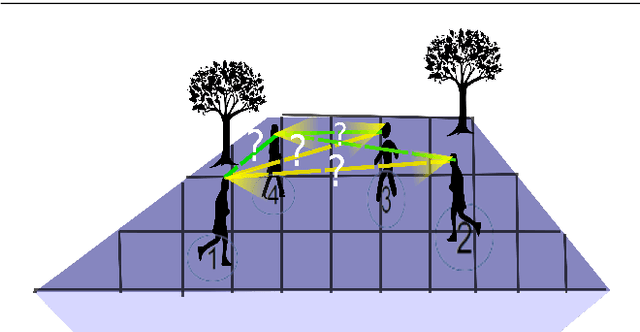

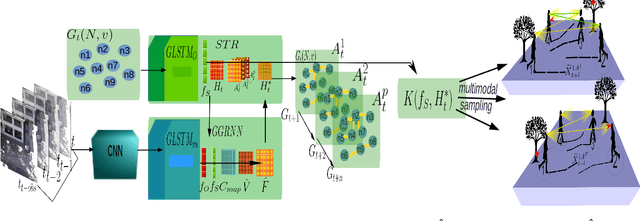
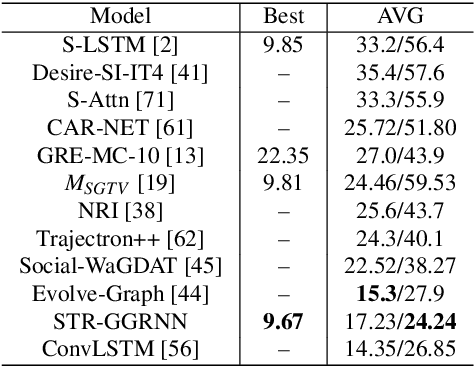
Pedestrian trajectory prediction is an active research area with recent works undertaken to embed accurate models of pedestrians social interactions and their contextual compliance into dynamic spatial graphs. However, existing works rely on spatial assumptions about the scene and dynamics, which entails a significant challenge to adapt the graph structure in unknown environments for an online system. In addition, there is a lack of assessment approach for the relational modeling impact on prediction performance. To fill this gap, we propose Social Trajectory Recommender-Gated Graph Recurrent Neighborhood Network, (STR-GGRNN), which uses data-driven adaptive online neighborhood recommendation based on the contextual scene features and pedestrian visual cues. The neighborhood recommendation is achieved by online Nonnegative Matrix Factorization (NMF) to construct the graph adjacency matrices for predicting the pedestrians' trajectories. Experiments based on widely-used datasets show that our method outperforms the state-of-the-art. Our best performing model achieves 12 cm ADE and $\sim$15 cm FDE on ETH-UCY dataset. The proposed method takes only 0.49 seconds when sampling a total of 20K future trajectories per frame.