Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSelection of Input Primitives for the Generalized Label Correcting Method
Paper and Code
Sep 20, 2016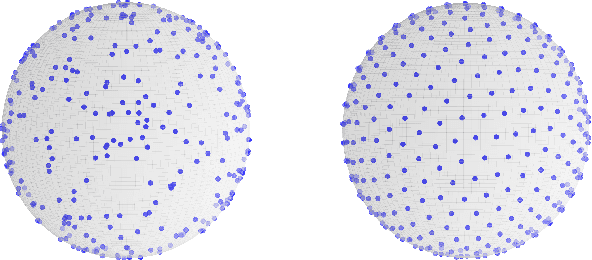

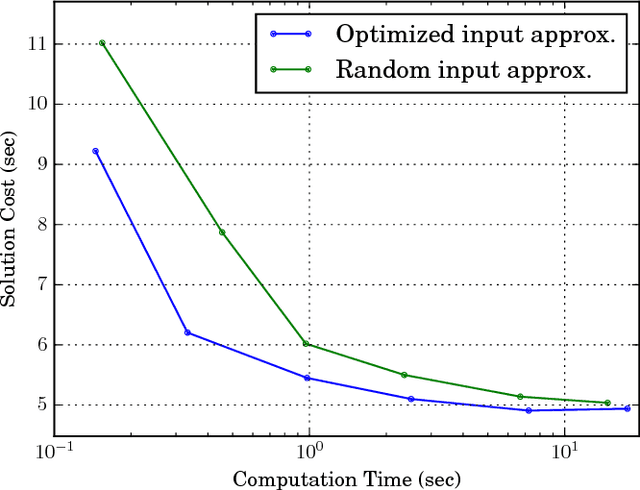
The generalized label correcting method is an efficient search-based approach to trajectory optimization. It relies on a finite set of control primitives that are concatenated into candidate control signals. This paper investigates the principled selection of this set of control primitives. Emphasis is placed on a particularly challenging input space geometry, the $n$-dimensional sphere. We propose using controls which minimize a generalized energy function and discuss the optimization technique used to obtain these control primitives. A numerical experiment is presented showing a factor of two improvement in running time when using the optimized control primitives over a random sampling strategy.
* 6 pages
View paper on