Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSDSRA: A Skill-Driven Skill-Recombination Algorithm for Efficient Policy Learning
Paper and Code
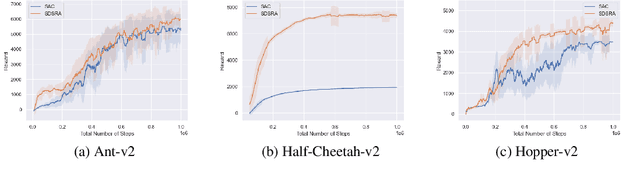
In this paper, we introduce a novel algorithm - the Skill-Driven Skill Recombination Algorithm (SDSRA) - an innovative framework that significantly enhances the efficiency of achieving maximum entropy in reinforcement learning tasks. We find that SDSRA achieves faster convergence compared to the traditional Soft Actor-Critic (SAC) algorithm and produces improved policies. By integrating skill-based strategies within the robust Actor-Critic framework, SDSRA demonstrates remarkable adaptability and performance across a wide array of complex and diverse benchmarks.
View paper on