 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable Estimation of Precision Maps in a MapReduce Framework
Paper and Code
Sep 24, 2016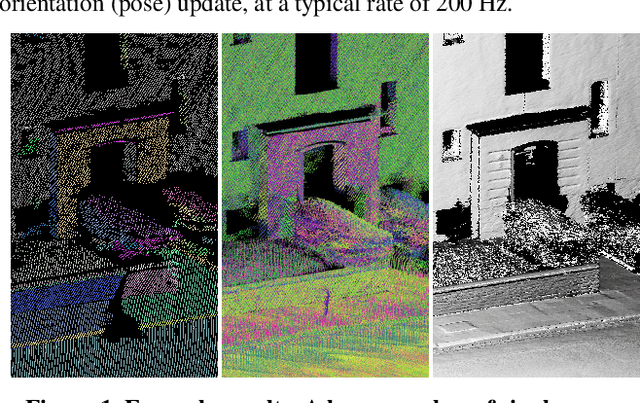


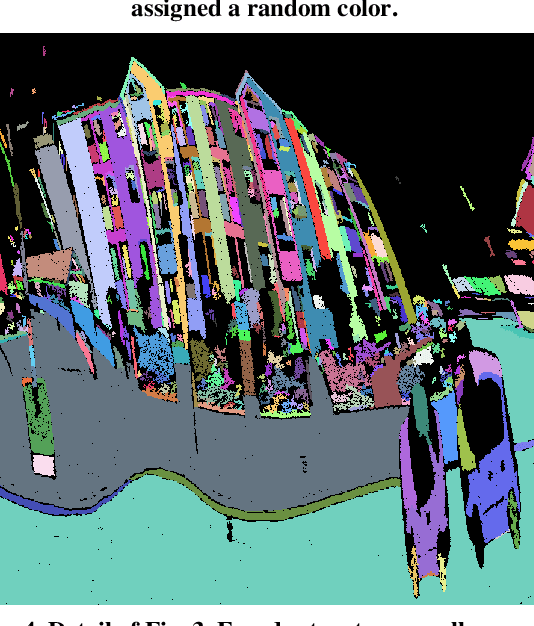
This paper presents a large-scale strip adjustment method for LiDAR mobile mapping data, yielding highly precise maps. It uses several concepts to achieve scalability. First, an efficient graph-based pre-segmentation is used, which directly operates on LiDAR scan strip data, rather than on point clouds. Second, observation equations are obtained from a dense matching, which is formulated in terms of an estimation of a latent map. As a result of this formulation, the number of observation equations is not quadratic, but rather linear in the number of scan strips. Third, the dynamic Bayes network, which results from all observation and condition equations, is partitioned into two sub-networks. Consequently, the estimation matrices for all position and orientation corrections are linear instead of quadratic in the number of unknowns and can be solved very efficiently using an alternating least squares approach. It is shown how this approach can be mapped to a standard key/value MapReduce implementation, where each of the processing nodes operates independently on small chunks of data, leading to essentially linear scalability. Results are demonstrated for a dataset of one billion measured LiDAR points and 278,000 unknowns, leading to maps with a precision of a few millimeters.