 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalability in Computing and Robotics
Paper and Code
Jun 08, 2020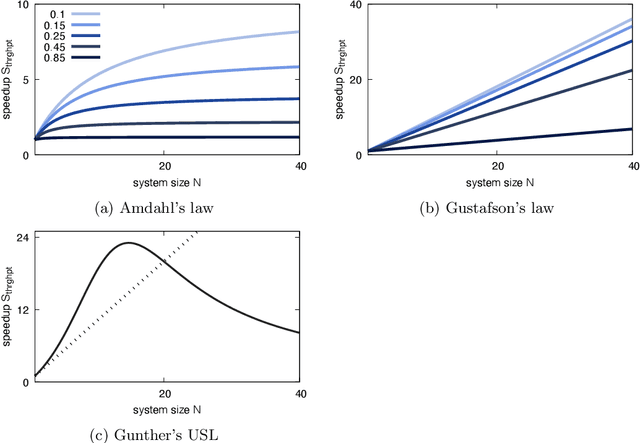
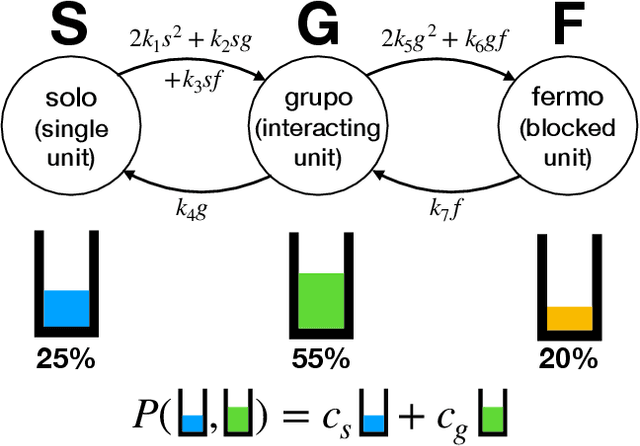

Efficient engineered systems require scalability. A scalable system has increasing performance with increasing system size. In an ideal case, the increase in performance (e.g., speedup) corresponds to the number of units that are added to the system. However, if multiple units work on the same task, then coordination among these units is required. This coordination can introduce overheads with an impact on system performance. The coordination costs can lead to sublinear improvement or even diminishing performance with increasing system size. However, there are also systems that implement efficient coordination and exploit collaboration of units to attain superlinear improvement. Modeling the scalability dynamics is key to understanding efficient systems. Known laws of scalability, such as Amdahl's law, Gustafson's law, and Gunther's Universal Scalability Law, are minimalistic phenomenological models that explain a rich variety of system behaviors through concise equations. While useful to gain general insights, the phenomenological nature of these models may limit the understanding of the underlying dynamics, as they are detached from first principles that could explain coordination overheads among units. Through a decentralized system approach, we propose a general model based on generic interactions between units that is able to describe, as specific cases, any general pattern of scalability included by previously reported laws. The proposed general model of scalability is built on first principles, or at least on a microscopic description of interaction between units, and therefore has the potential to contribute to a better understanding of system behavior and scalability. We show that this model can be applied to a diverse set of systems, such as parallel supercomputers, robot swarms, or wireless sensor networks, creating a unified view on interdisciplinary design for scalability.