 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSAWNet: A Spatially Aware Deep Neural Network for 3D Point Cloud Processing
Paper and Code
May 18, 2019
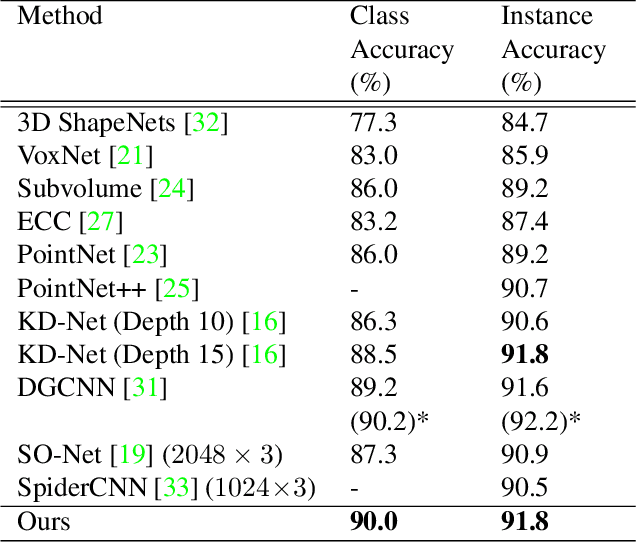
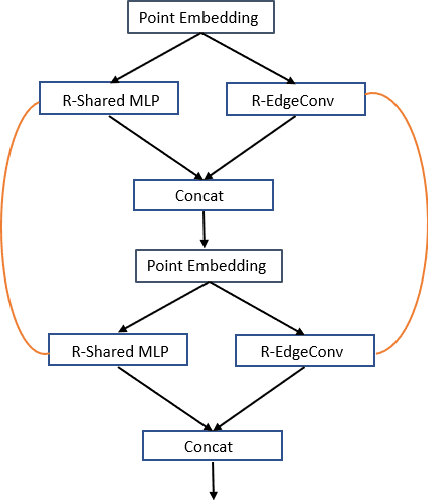
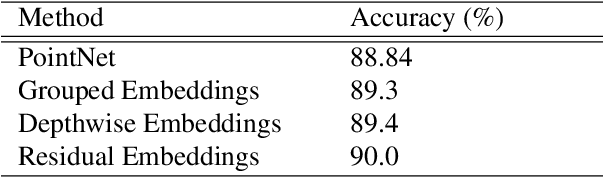
Deep neural networks have established themselves as the state-of-the-art methodology in almost all computer vision tasks to date. But their application to processing data lying on non-Euclidean domains is still a very active area of research. One such area is the analysis of point cloud data which poses a challenge due to its lack of order. Many recent techniques have been proposed, spearheaded by the PointNet architecture. These techniques use either global or local information from the point clouds to extract a latent representation for the points, which is then used for the task at hand (classification/segmentation). In our work, we introduce a neural network layer that combines both global and local information to produce better embeddings of these points. We enhance our architecture with residual connections, to pass information between the layers, which also makes the network easier to train. We achieve state-of-the-art results on the ModelNet40 dataset with our architecture, and our results are also highly competitive with the state-of-the-art on the ShapeNet part segmentation dataset and the indoor scene segmentation dataset. We plan to open source our pre-trained models on github to encourage the research community to test our networks on their data, or simply use them for benchmarking purposes.