 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSampling Strategies for Path Planning under Kinematic Constraints
Paper and Code
Jul 09, 2014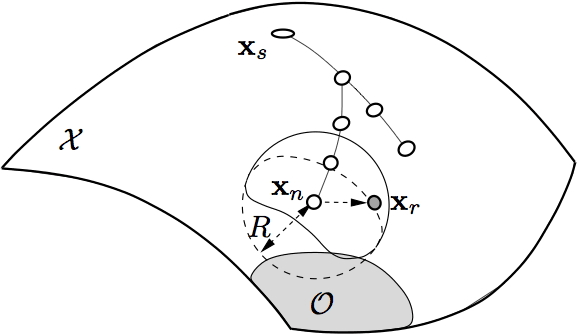

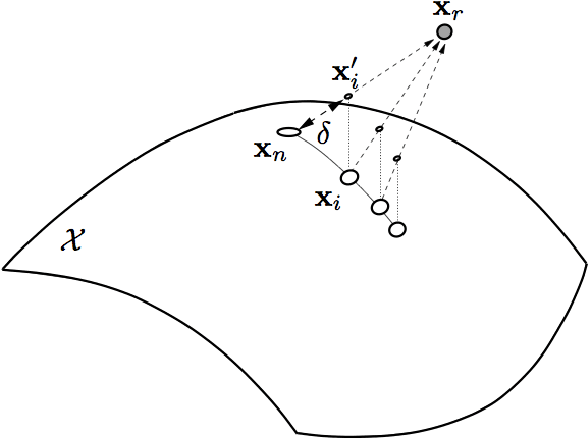
A well-known weakness of the probabilistic path planners is the so-called narrow passage problem, where a region with a relatively low probability of being sampled must be explored to find a solution path. Many strategies have been proposed to alleviate this problem, most of them based on biasing the sampling distribution. When kinematic constraints appear in the problem, the configuration space typically becomes a non-parametrizable, implicit manifold. Unfortunately, this invalidates most of the existing sampling bias approaches, which rely on an explicit parametrization of the space to explore. In this paper, we propose and evaluate three novel strategies to bias the sampling under the presence of narrow passages in kinematically-constrained systems.