 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSample-Derived Disjunctive Rules for Secure Power System Operation
Paper and Code
Apr 09, 2018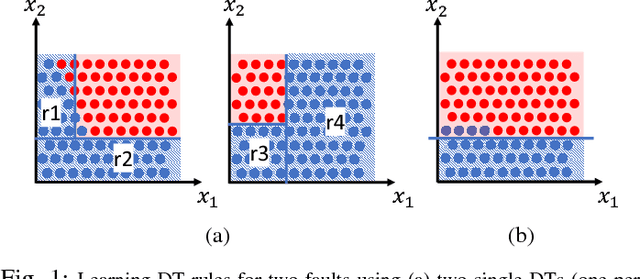
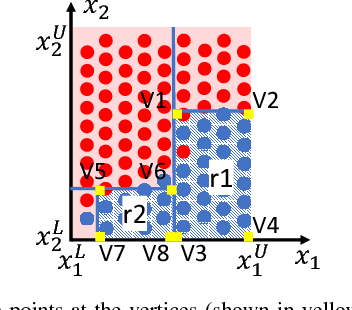
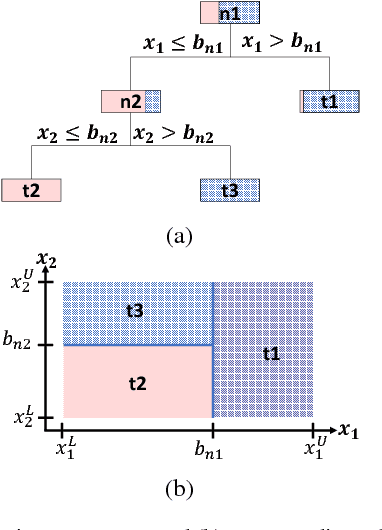
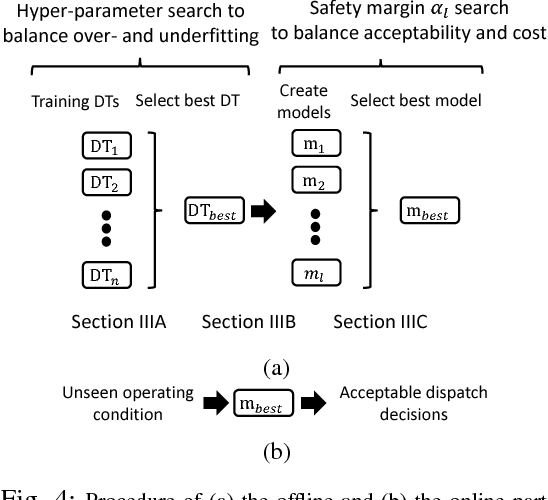
Machine learning techniques have been used in the past using Monte Carlo samples to construct predictors of the dynamic stability of power systems. In this paper we move beyond the task of prediction and propose a comprehensive approach to use predictors, such as Decision Trees (DT), within a standard optimization framework for pre- and post-fault control purposes. In particular, we present a generalizable method for embedding rules derived from DTs in an operation decision-making model. We begin by pointing out the specific challenges entailed when moving from a prediction to a control framework. We proceed with introducing the solution strategy based on generalized disjunctive programming (GDP) as well as a two-step search method for identifying optimal hyper-parameters for balancing cost and control accuracy. We showcase how the proposed approach constructs security proxies that cover multiple contingencies while facing high-dimensional uncertainty with respect to operating conditions with the use of a case study on the IEEE 39-bus system. The method is shown to achieve efficient system control at a marginal increase in system price compared to an oracle model.