 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafety Verification of Model Based Reinforcement Learning Controllers
Paper and Code
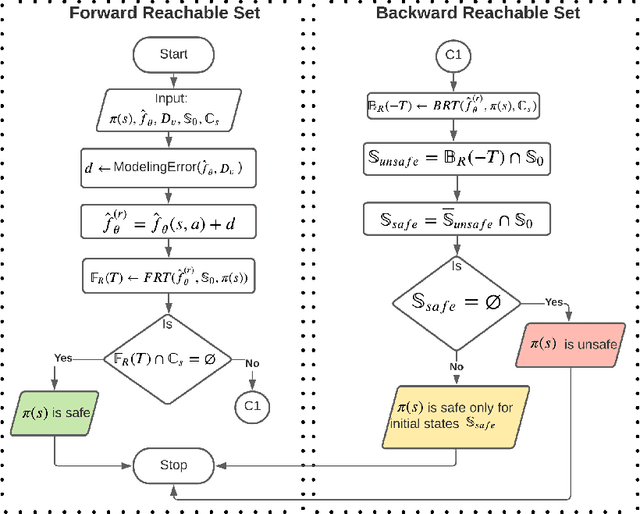

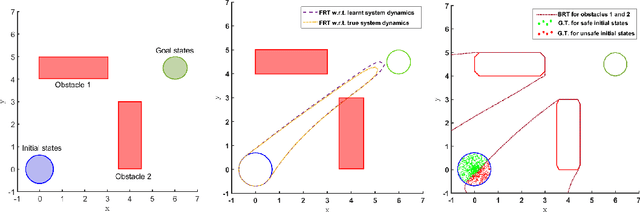
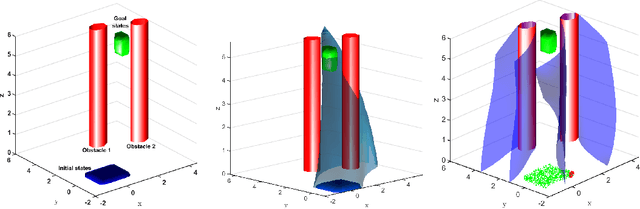
Model-based reinforcement learning (RL) has emerged as a promising tool for developing controllers for real world systems (e.g., robotics, autonomous driving, etc.). However, real systems often have constraints imposed on their state space which must be satisfied to ensure the safety of the system and its environment. Developing a verification tool for RL algorithms is challenging because the non-linear structure of neural networks impedes analytical verification of such models or controllers. To this end, we present a novel safety verification framework for model-based RL controllers using reachable set analysis. The proposed frame-work can efficiently handle models and controllers which are represented using neural networks. Additionally, if a controller fails to satisfy the safety constraints in general, the proposed framework can also be used to identify the subset of initial states from which the controller can be safely executed.