 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSafe and Psychologically Pleasant Traffic Signal Control with Reinforcement Learning using Action Masking
Paper and Code
Jun 21, 2022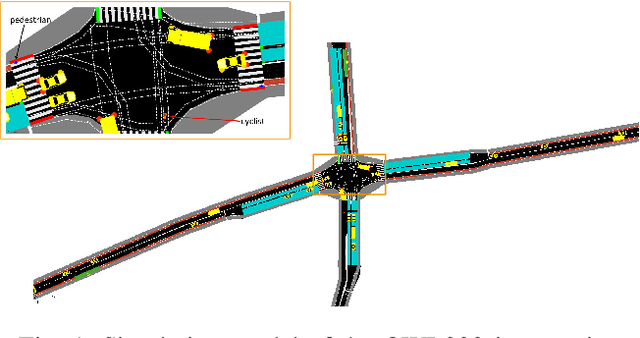
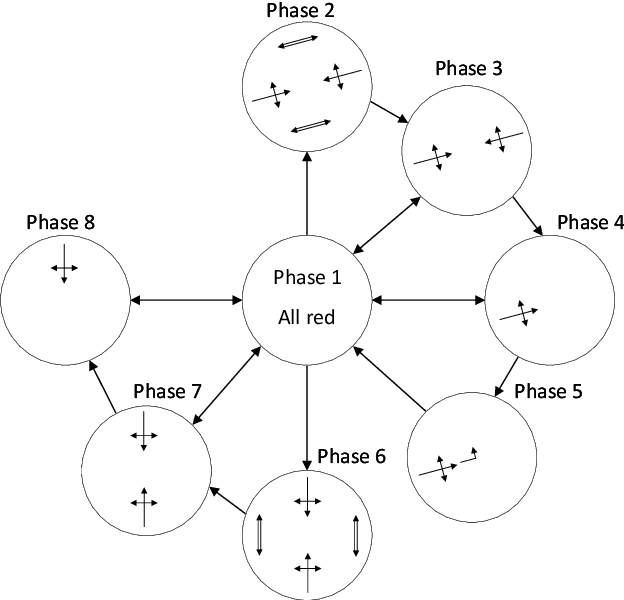
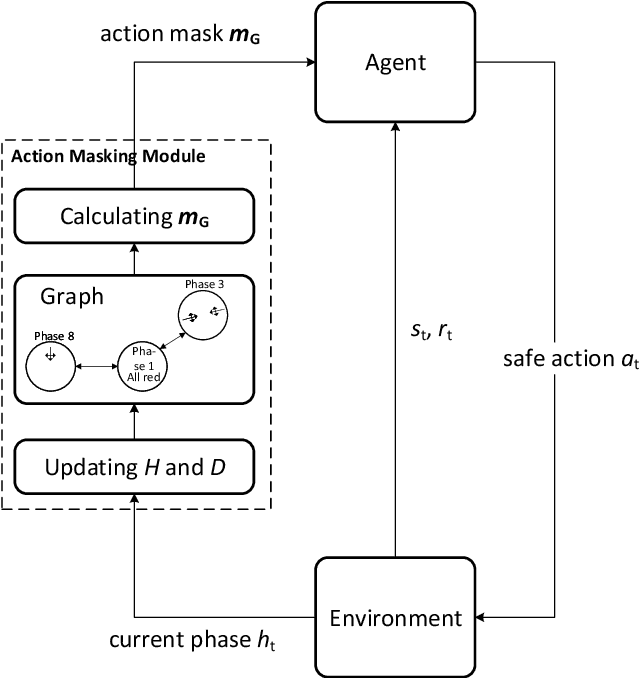
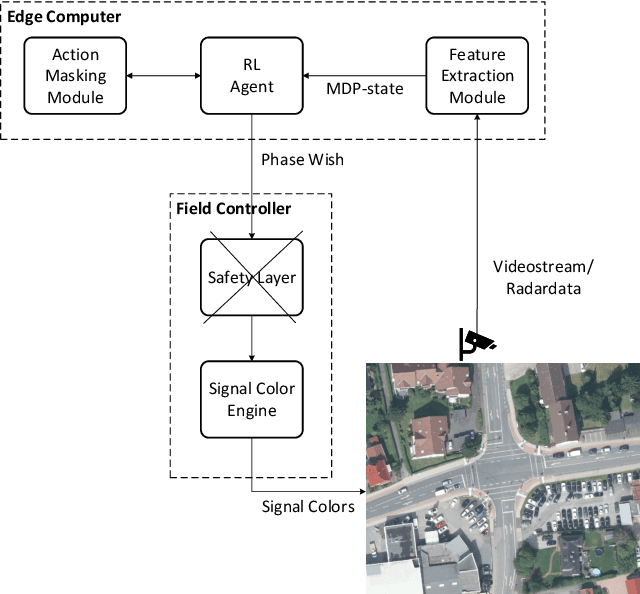
Reinforcement learning (RL) for traffic signal control (TSC) has shown better performance in simulation for controlling the traffic flow of intersections than conventional approaches. However, due to several challenges, no RL-based TSC has been deployed in the field yet. One major challenge for real-world deployment is to ensure that all safety requirements are met at all times during operation. We present an approach to ensure safety in a real-world intersection by using an action space that is safe by design. The action space encompasses traffic phases, which represent the combination of non-conflicting signal colors of the intersection. Additionally, an action masking mechanism makes sure that only appropriate phase transitions are carried out. Another challenge for real-world deployment is to ensure a control behavior that avoids stress for road users. We demonstrate how to achieve this by incorporating domain knowledge through extending the action masking mechanism. We test and verify our approach in a realistic simulation scenario. By ensuring safety and psychologically pleasant control behavior, our approach drives development towards real-world deployment of RL for TSC.