 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRotational Odometry using Ultra Low Resolution Thermal Cameras
Paper and Code
Nov 02, 2024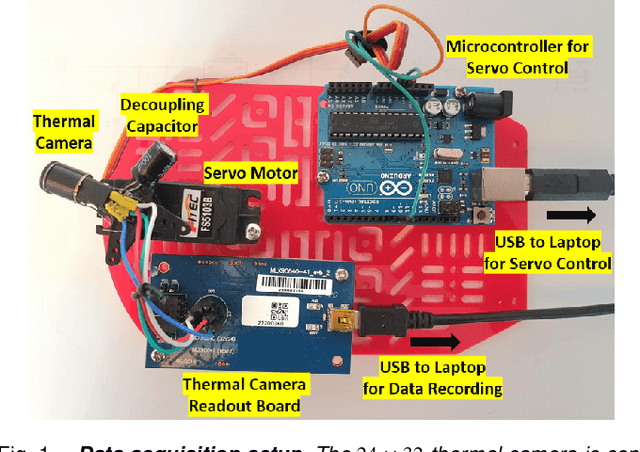
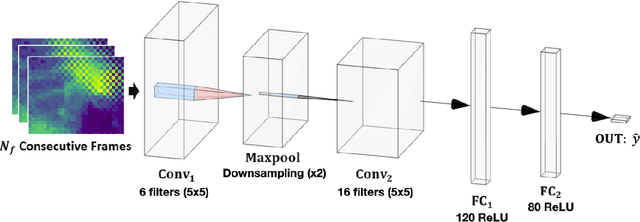
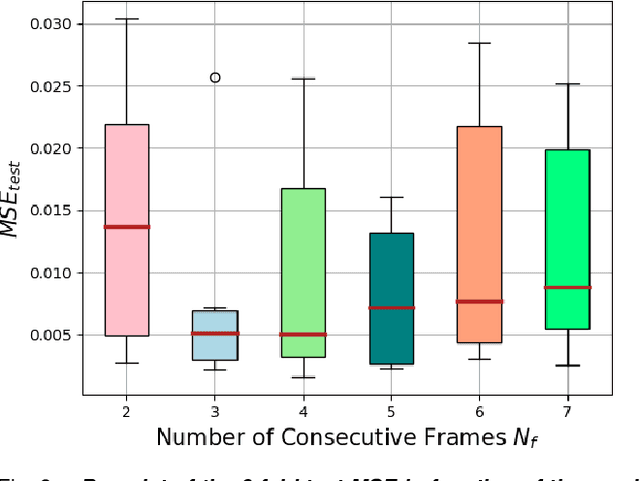
This letter provides what is, to the best of our knowledge, a first study on the applicability of ultra-low-resolution thermal cameras for providing rotational odometry measurements to navigational devices such as rovers and drones. Our use of an ultra-low-resolution thermal camera instead of other modalities such as an RGB camera is motivated by its robustness to lighting conditions, while being one order of magnitude less cost-expensive compared to higher-resolution thermal cameras. After setting up a custom data acquisition system and acquiring thermal camera data together with its associated rotational speed label, we train a small 4-layer Convolutional Neural Network (CNN) for regressing the rotational speed from the thermal data. Experiments and ablation studies are conducted for determining the impact of thermal camera resolution and the number of successive frames on the CNN estimation precision. Finally, our novel dataset for the study of low-resolution thermal odometry is openly released with the hope of benefiting future research.