 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeROS-Neuro Integration of Deep Convolutional Autoencoders for EEG Signal Compression in Real-time BCIs
Paper and Code
Aug 31, 2020
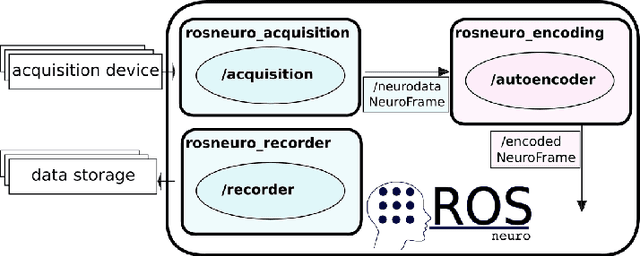
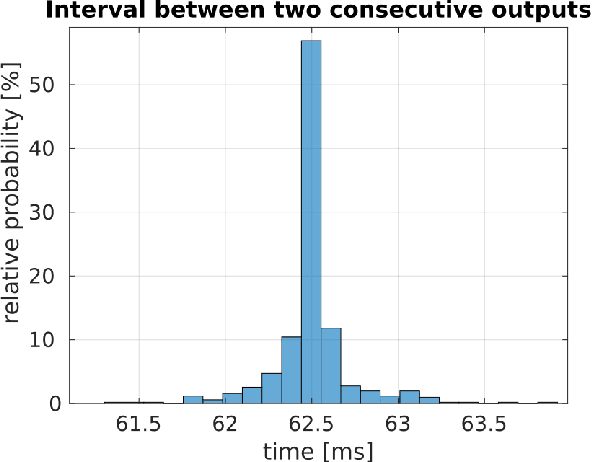
Typical EEG-based BCI applications require the computation of complex functions over the noisy EEG channels to be carried out in an efficient way. Deep learning algorithms are capable of learning flexible nonlinear functions directly from data, and their constant processing latency is perfect for their deployment into online BCI systems. However, it is crucial for the jitter of the processing system to be as low as possible, in order to avoid unpredictable behaviour that can ruin the system's overall usability. In this paper, we present a novel encoding method, based on on deep convolutional autoencoders, that is able to perform efficient compression of the raw EEG inputs. We deploy our model in a ROS-Neuro node, thus making it suitable for the integration in ROS-based BCI and robotic systems in real world scenarios. The experimental results show that our system is capable to generate meaningful compressed encoding preserving to original information contained in the raw input. They also show that the ROS-Neuro node is able to produce such encodings at a steady rate, with minimal jitter. We believe that our system can represent an important step towards the development of an effective BCI processing pipeline fully standardized in ROS-Neuro framework.