Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Trajectory Tracking Error Model-Based Predictive Control for Unmanned Ground Vehicles
Paper and Code
Mar 31, 2021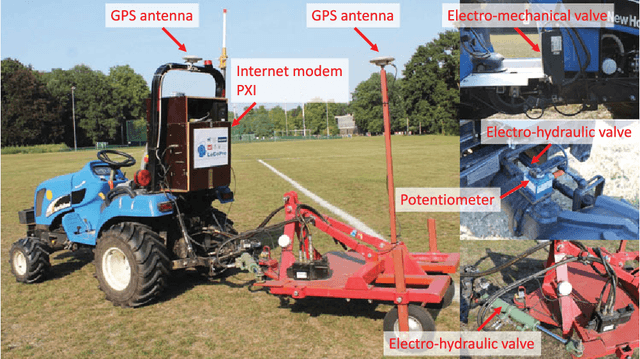
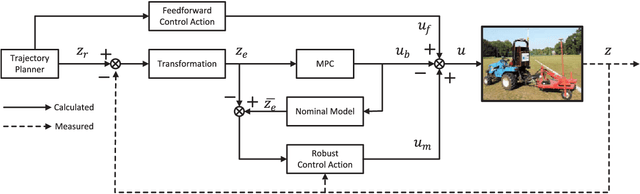
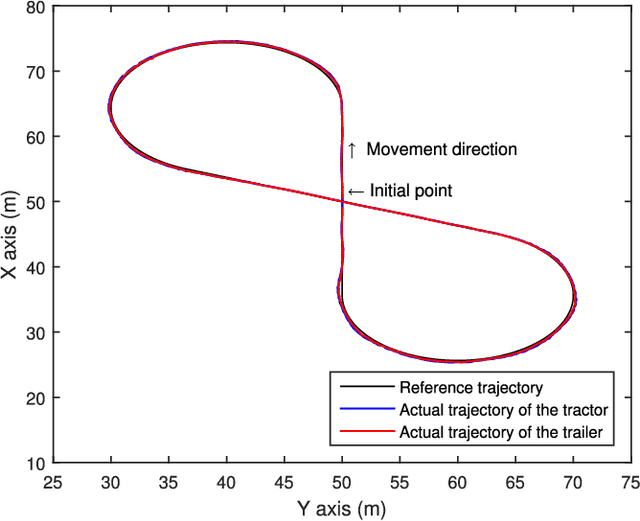
This paper proposes a new robust trajectory tracking error-based control approach for unmanned ground vehicles. A trajectory tracking error-based model is used to design a linear model predictive controller and its control action is combined with feedforward and robust control actions. The experimental results show that the proposed control structure is capable to let a tractor-trailer system track both linear and curvilinear target trajectories with low tracking error.
* IEEE/ASME Transactions on Mechatronics, Volume 21, Issue 2, 2016
View paper on