 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust and Real Time Detection of Curvy Lanes with Desired Slopes for Driving Assistance and Autonomous Vehicles
Paper and Code
Jan 13, 2015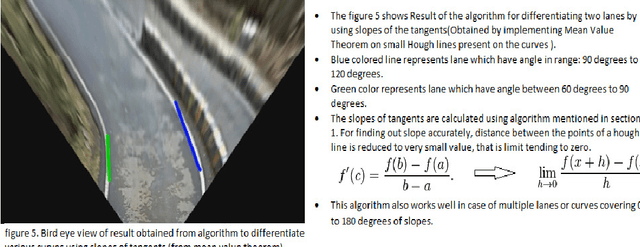
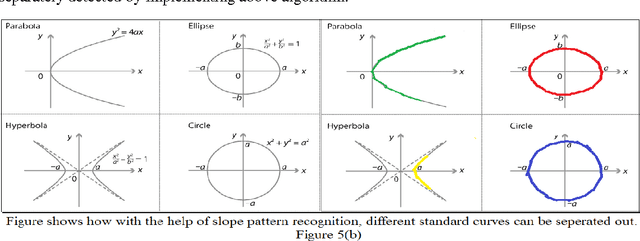
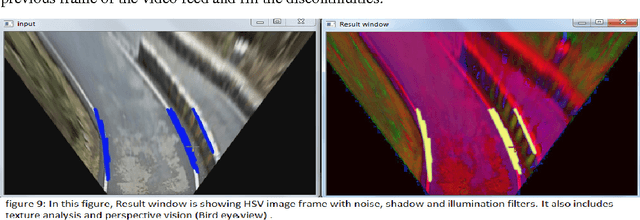
One of the biggest reasons for road accidents is curvy lanes and blind turns. Even one of the biggest hurdles for new autonomous vehicles is to detect curvy lanes, multiple lanes and lanes with a lot of discontinuity and noise. This paper presents very efficient and advanced algorithm for detecting curves having desired slopes (especially for detecting curvy lanes in real time) and detection of curves (lanes) with a lot of noise, discontinuity and disturbances. Overall aim is to develop robust method for this task which is applicable even in adverse conditions. Even in some of most famous and useful libraries like OpenCV and Matlab, there is no function available for detecting curves having desired slopes , shapes, discontinuities. Only few predefined shapes like circle, ellipse, etc, can be detected using presently available functions. Proposed algorithm can not only detect curves with discontinuity, noise, desired slope but also it can perform shadow and illumination correction and detect/ differentiate between different curves.