 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Message Ferrying for Wireless Networks using Coarse-Grained Backpressure Control
Paper and Code
Aug 13, 2013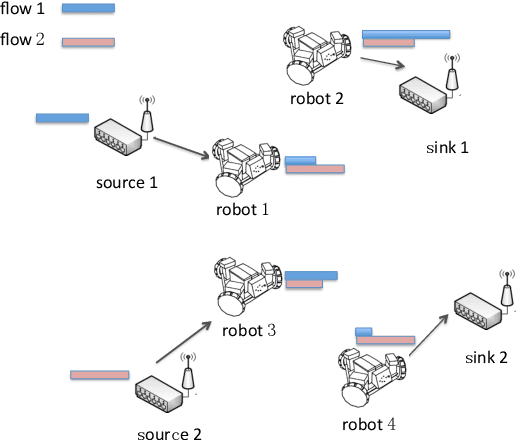
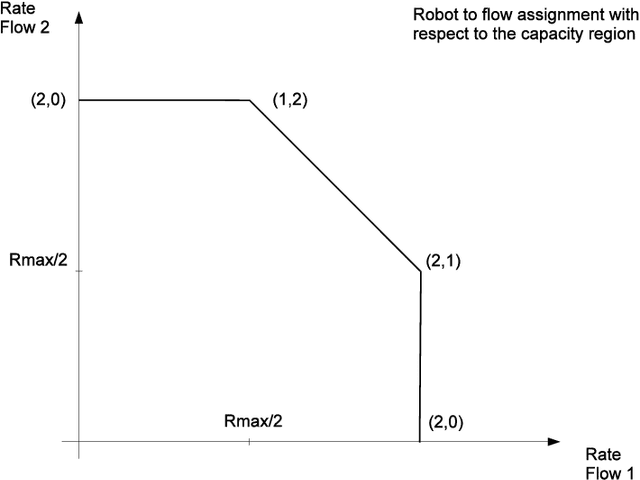
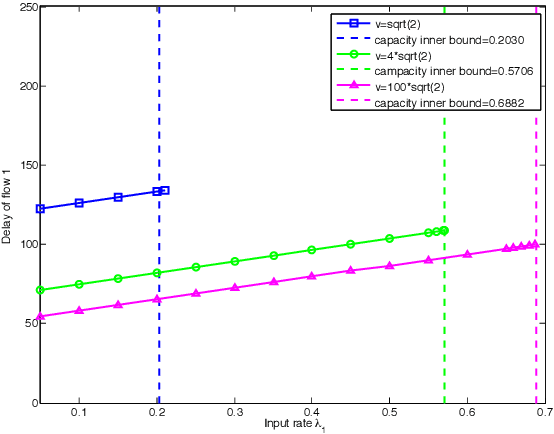
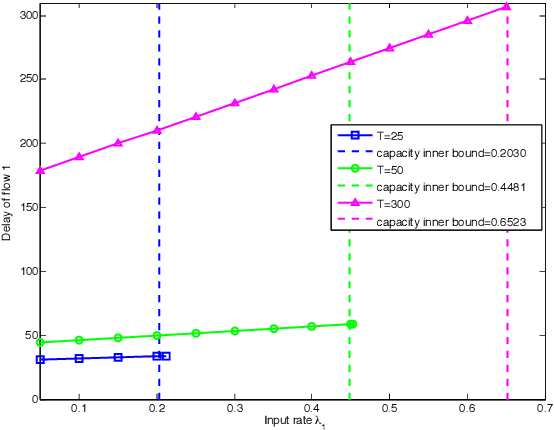
We formulate the problem of robots ferrying messages between statically-placed source and sink pairs that they can communicate with wirelessly. We first analyze the capacity region for this problem under both ideal (arbitrarily high velocity, long scheduling periods) and realistic conditions. We indicate how robots could be scheduled optimally to satisfy any arrival rate in the capacity region, given prior knowledge about arrival rates. We find that if the number of robots allocated grows proportionally with the number of source-sink pairs, then the capacity of the network scales as $\Theta(1)$, similar to what was shown previously by Grossglauser and Tse for uncontrolled mobility; however, in contrast to that prior result, we also find that with controlled mobility this constant capacity scaling can be obtained while ensuring finite delay. We then consider the setting where the arrival rates are unknown and present a coarse-grained backpressure message ferrying algorithm (CBMF) for it. In CBMF, the robots are matched to sources and sinks once every epoch to maximize a queue-differential-based weight. The matching controls both motion and transmission for each robot: if a robot is matched to a source, it moves towards that source and collects data from it; and if it is matched to a sink, it moves towards that sink and transmits data to it. We show through analysis and simulations the conditions under which CBMF can stabilize the network. We show that the maximum achievable stable throughput with this policy tends to the ideal capacity as the schedule duration and robot velocity increase.