 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic Ironing with 3D Perception and Force/Torque Feedback in Household Environments
Paper and Code
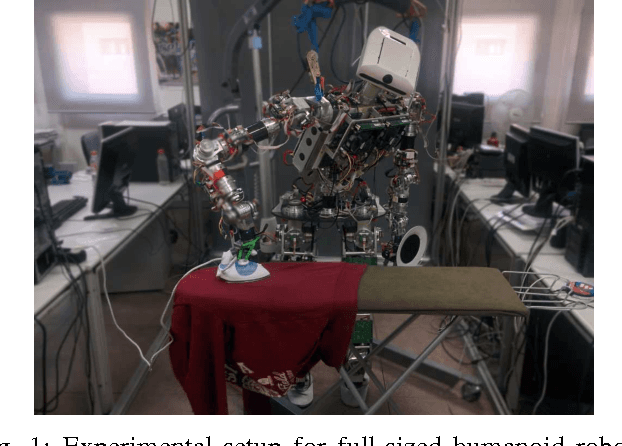
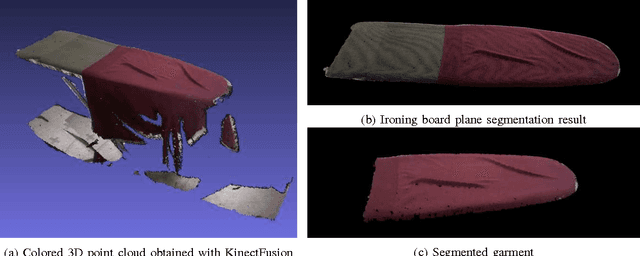
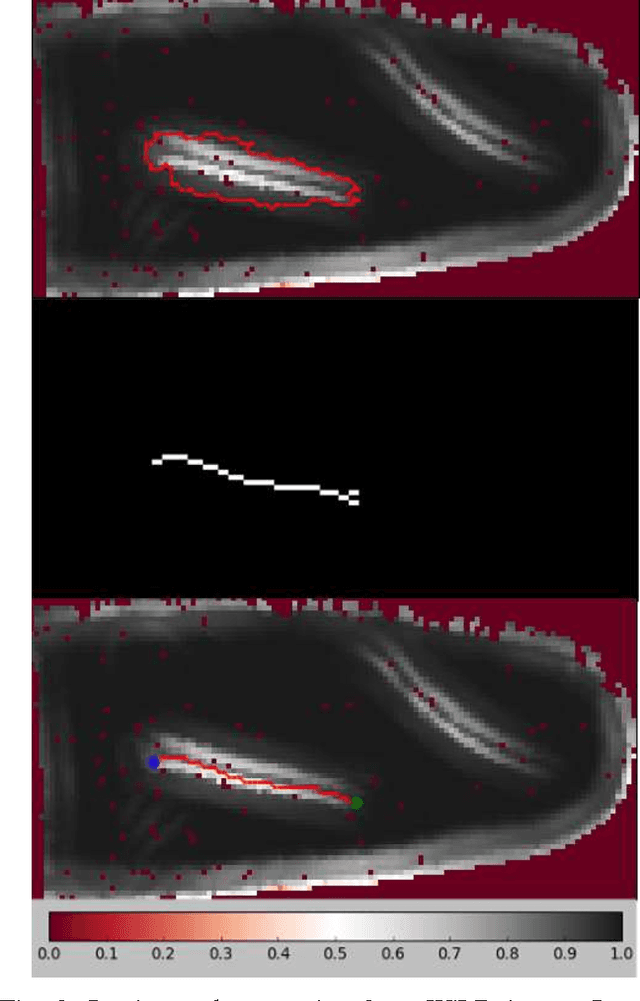
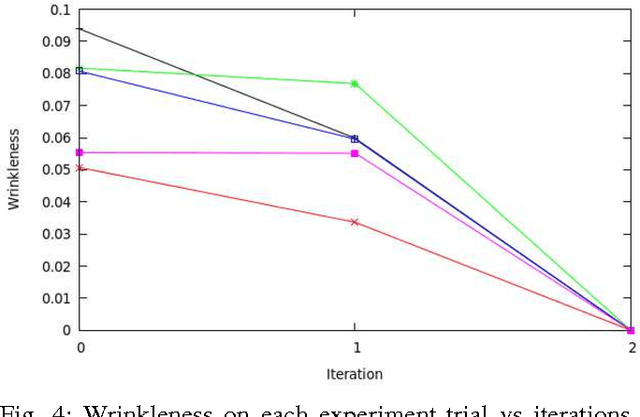
As robotic systems become more popular in household environments, the complexity of required tasks also increases. In this work we focus on a domestic chore deemed dull by a majority of the population, the task of ironing. The presented algorithm improves on the limited number of previous works by joining 3D perception with force/torque sensing, with emphasis on finding a practical solution with a feasible implementation in a domestic setting. Our algorithm obtains a point cloud representation of the working environment. From this point cloud, the garment is segmented and a custom Wrinkleness Local Descriptor (WiLD) is computed to determine the location of the present wrinkles. Using this descriptor, the most suitable ironing path is computed and, based on it, the manipulation algorithm performs the force-controlled ironing operation. Experiments have been performed with a humanoid robot platform, proving that our algorithm is able to detect successfully wrinkles present in garments and iteratively reduce the wrinkleness using an unmodified iron.