 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobotic design choice overview using co-simulation
Paper and Code
Feb 17, 2018
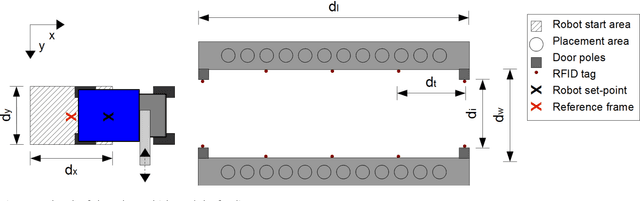
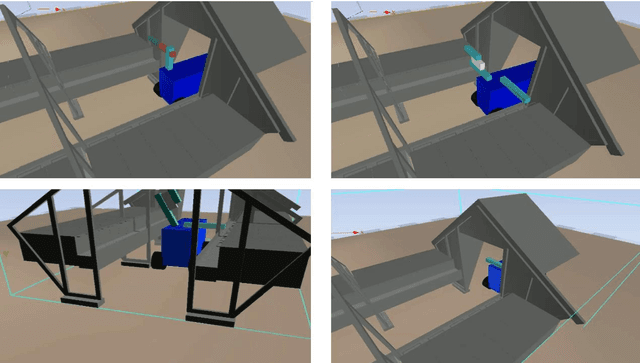
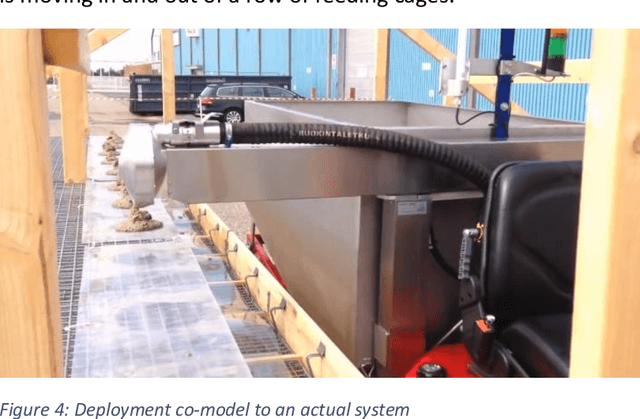
Rapid robotic system development sets a demand for multi-disciplinary methods and tools to explore and compare design alternatives. In this paper, we present collaborative modeling that combines discrete-event models of controller software with continuous-time models of physical robot components. The presented co-modeling method utilized VDM for discrete-event and 20-sim for continuous-time modeling. The collaborative modeling method is illustrated with a concrete example of collaborative model development of a mobile robot animal feeding system. Simulations are used to evaluate the robot model output response in relation to operational demands. The result of the simulations provides the developers with an overview of the impacts of each solution instance in the chosen design space. Based on the solution overview the developers can select candidates that are deemed viable to be deployed and tested on an actual physical robot.