 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot navigation and target capturing using nature-inspired approaches in a dynamic environment
Paper and Code
Nov 06, 2019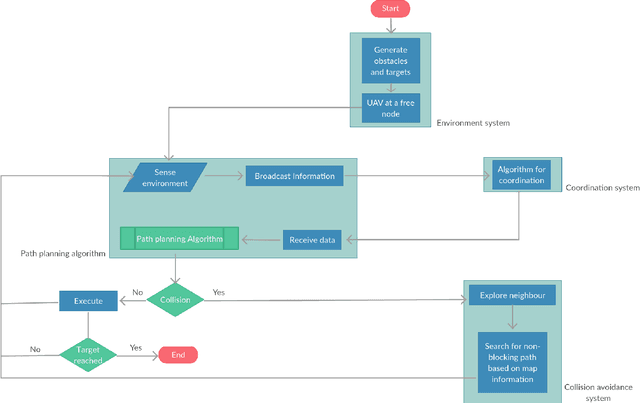

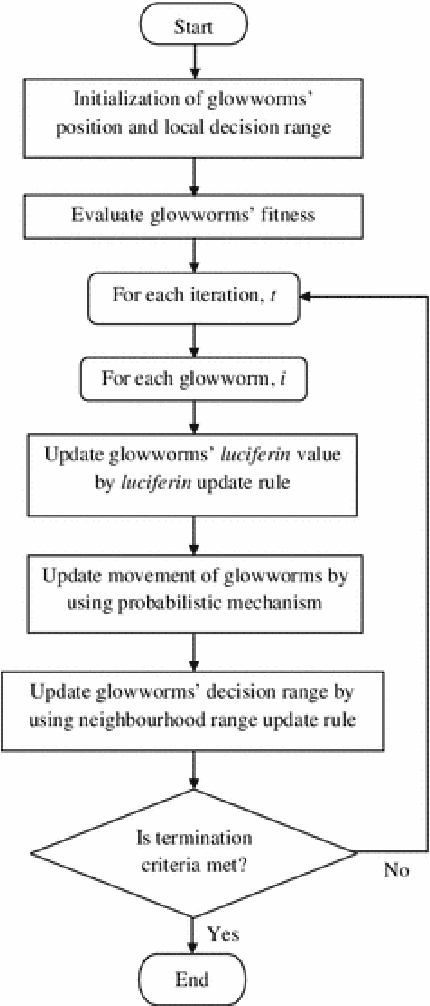
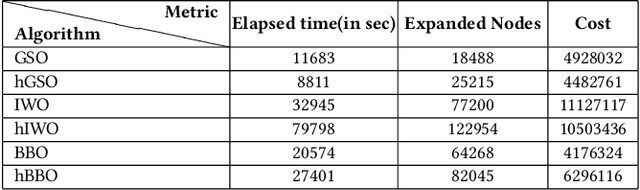
Path Planning and target searching in a three-dimensional environment is a challenging task in the field of robotics. It is an optimization problem as the path from source to destination has to be optimal. This paper aims to generate a collision-free trajectory in a dynamic environment. The path planning problem has sought to be of extreme importance in the military, search and rescue missions and in life-saving tasks. During its operation, the unmanned air vehicle operates in a hostile environment, and faster replanning is needed to reach the target as optimally as possible. This paper presents a novel approach of hierarchical planning using multiresolution abstract levels for faster replanning. Economic constraints like path length, total path planning time and the number of turns are taken into consideration that mandate the use of cost functions. Experimental results show that the hierarchical version of GSO gives better performance compared to the BBO, IWO and their hierarchical versions.