 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobot Imitation through Vision, Kinesthetic and Force Features with Online Adaptation to Changing Environments
Paper and Code
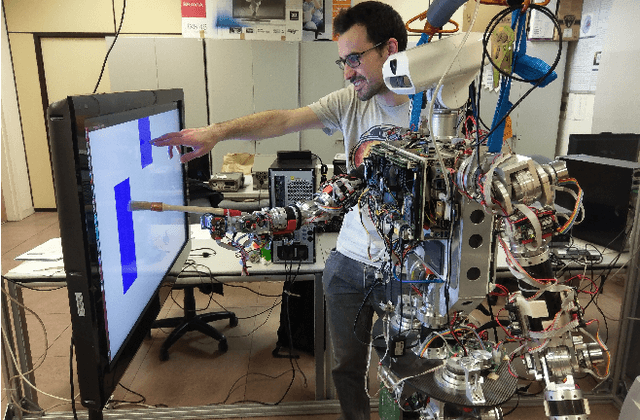
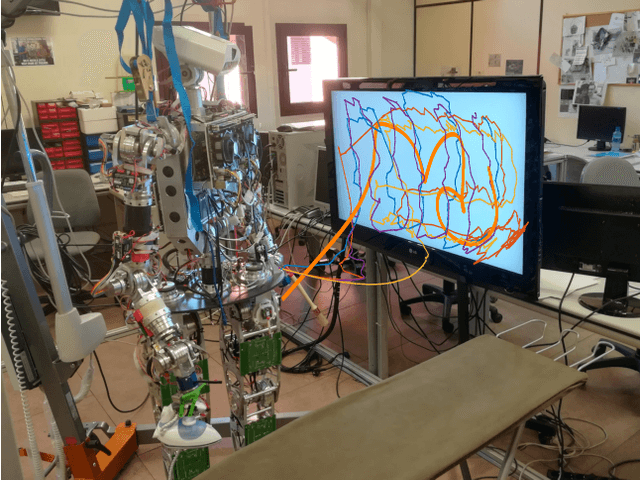
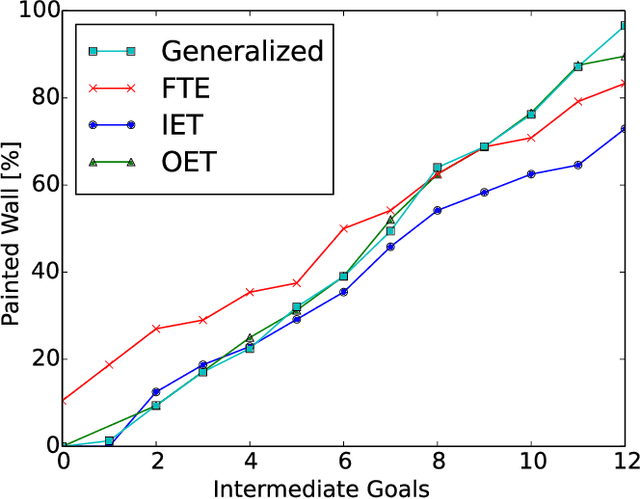
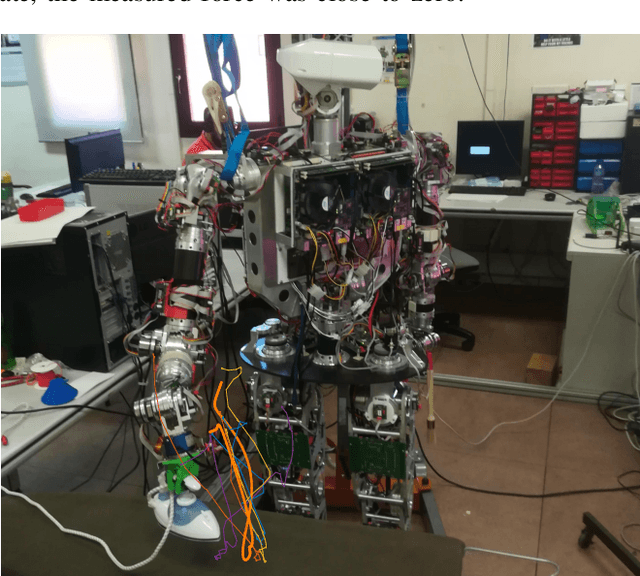
Continuous Goal-Directed Actions (CGDA) is a robot imitation framework that encodes actions as the changes they produce on the environment. While it presents numerous advantages with respect to other robot imitation frameworks in terms of generalization and portability, final robot joint trajectories for the execution of actions are not necessarily encoded within the model. This is studied as an optimization problem, and the solution is computed through evolutionary algorithms in simulated environments. Evolutionary algorithms require a large number of evaluations, which had made the use of these algorithms in real world applications very challenging. This paper presents online evolutionary strategies, as a change of paradigm within CGDA execution. Online evolutionary strategies shift and merge motor execution into the planning loop. A concrete online evolutionary strategy, Online Evolved Trajectories (OET), is presented. OET drastically reduces computational times between motor executions, and enables working in real world dynamic environments and/or with human collaboration. Its performance has been measured against Full Trajectory Evolution (FTE) and Incrementally Evolved Trajectories (IET), obtaining the best overall results. Experimental evaluations are performed on the TEO full-sized humanoid robot with "paint" and "iron" actions that together involve vision, kinesthetic and force features.