 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeROBO: Robust, Fully Neural Object Detection for Robot Soccer
Paper and Code
Oct 24, 2019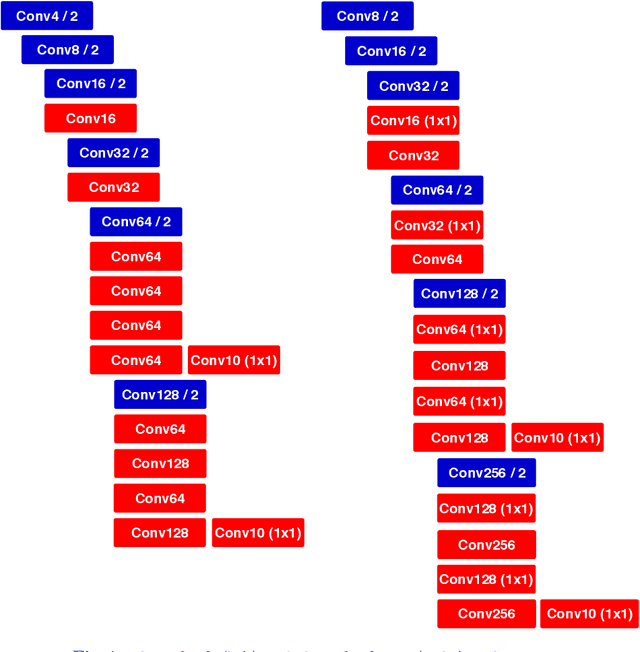
Deep Learning has become exceptionally popular in the last few years due to its success in computer vision and other fields of AI. However, deep neural networks are computationally expensive, which limits their application in low power embedded systems, such as mobile robots. In this paper, an efficient neural network architecture is proposed for the problem of detecting relevant objects in robot soccer environments. The ROBO model's increase in efficiency is achieved by exploiting the peculiarities of the environment. Compared to the state-of-the-art Tiny YOLO model, the proposed network provides approximately 35 times decrease in run time, while achieving superior average precision, although at the cost of slightly worse localization accuracy.