 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRisk Structures: Towards Engineering Risk-aware Autonomous Systems
Paper and Code
Apr 23, 2019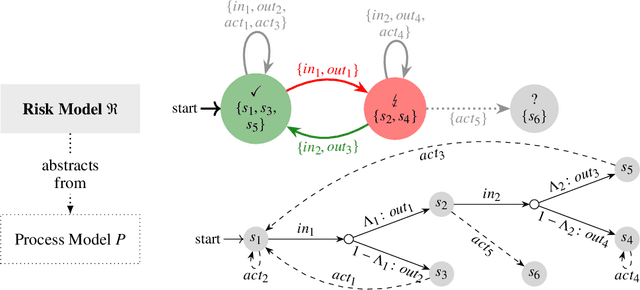

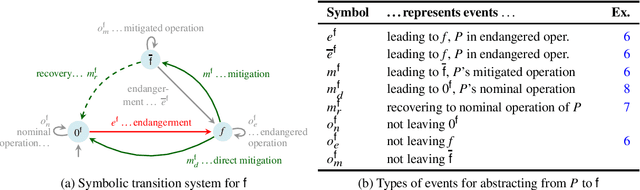

Inspired by widely-used techniques of causal modelling in risk, failure, and accident analysis, this work discusses a compositional framework for risk modelling. Risk models capture fragments of the space of risky events likely to occur when operating a machine in a given environment. Moreover, one can build such models into machines such as autonomous robots, to equip them with the ability of risk-aware perception, monitoring, decision making, and control. With the notion of a risk factor as the modelling primitive, the framework provides several means to construct and shape risk models. Relational and algebraic properties are investigated and proofs support the validity and consistency of these properties over the corresponding models. Several examples throughout the discussion illustrate the applicability of the concepts. Overall, this work focuses on the qualitative treatment of risk with the outlook of transferring these results to probabilistic refinements of the discussed framework.