 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRisk-based Triggering of Bio-inspired Self-Preservation to Protect Robots from Threats
Paper and Code
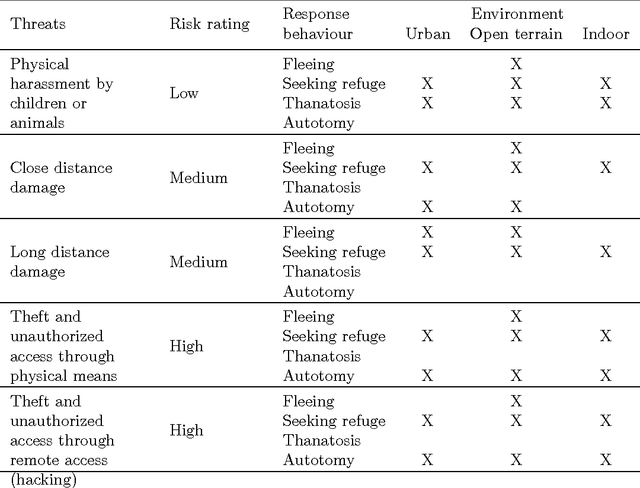

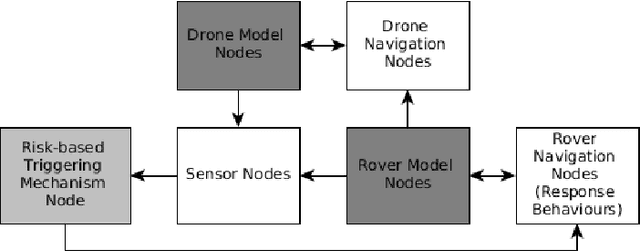
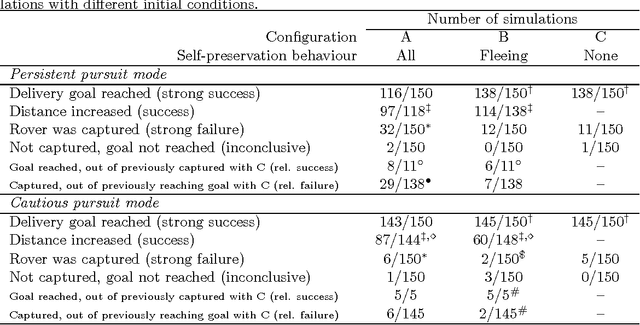
Safety in autonomous systems has been mostly studied from a human-centered perspective. Besides the loads they may carry, autonomous systems are also valuable property, and self-preservation mechanisms are needed to protect them in the presence of external threats, including malicious robots and antagonistic humans. We present a biologically inspired risk-based triggering mechanism to initiate self-preservation strategies. This mechanism considers environmental and internal system factors to measure the overall risk at any moment in time, to decide whether behaviours such as fleeing or hiding are necessary, or whether the system should continue on its task. We integrated our risk-based triggering mechanism into a delivery rover that is being attacked by a drone and evaluated its effectiveness through systematic testing in a simulated environment in Robot Operating System (ROS) and Gazebo, with a variety of different randomly generated conditions. We compared the use of the triggering mechanism and different configurations of self-preservation behaviours to not having any of these. Our results show that triggering self-preservation increases the distance between the drone and the rover for many of these configurations, and, in some instances, the drone does not catch up with the rover. Our study demonstrates the benefits of embedding risk awareness and self-preservation into autonomous systems to increase their robustness, and the value of using bio-inspired engineering to find solutions in this area.