Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRGB-D Neural Radiance Fields: Local Sampling for Faster Training
Paper and Code
Mar 26, 2022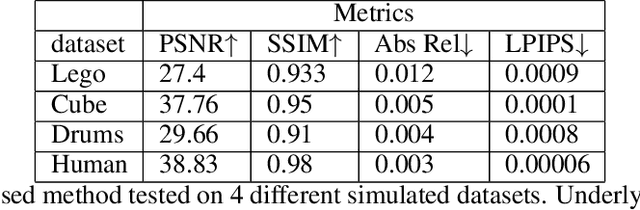
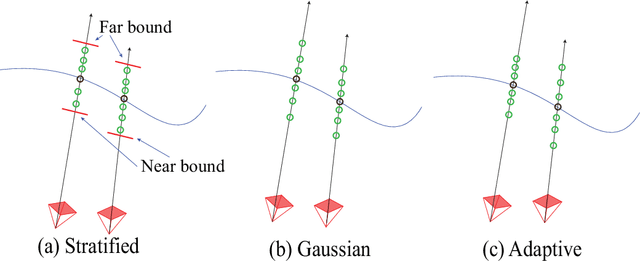
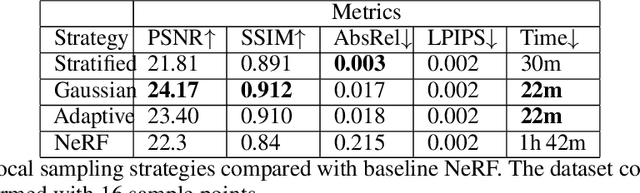
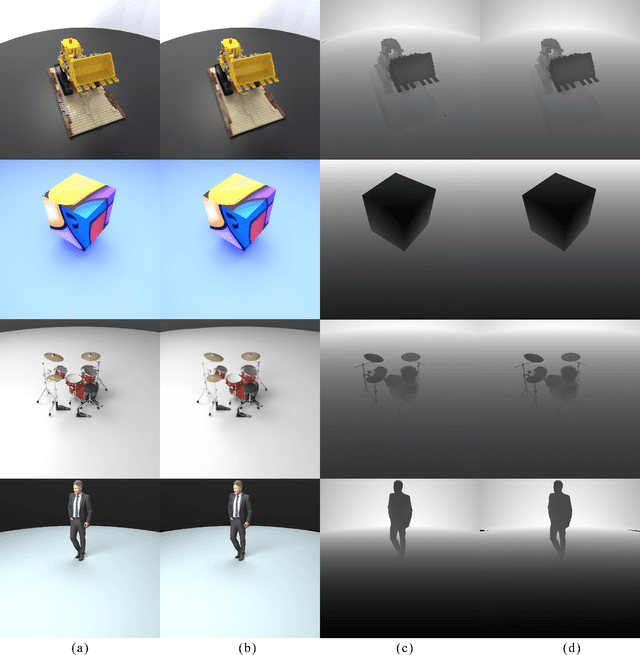
Learning a 3D representation of a scene has been a challenging problem for decades in computer vision. Recent advances in implicit neural representation from images using neural radiance fields(NeRF) have shown promising results. Some of the limitations of previous NeRF based methods include longer training time, and inaccurate underlying geometry. The proposed method takes advantage of RGB-D data to reduce training time by leveraging depth sensing to improve local sampling. This paper proposes a depth-guided local sampling strategy and a smaller neural network architecture to achieve faster training time without compromising quality.
View paper on