 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRestoreX-AI: A Contrastive Approach towards Guiding Image Restoration via Explainable AI Systems
Paper and Code
Apr 03, 2022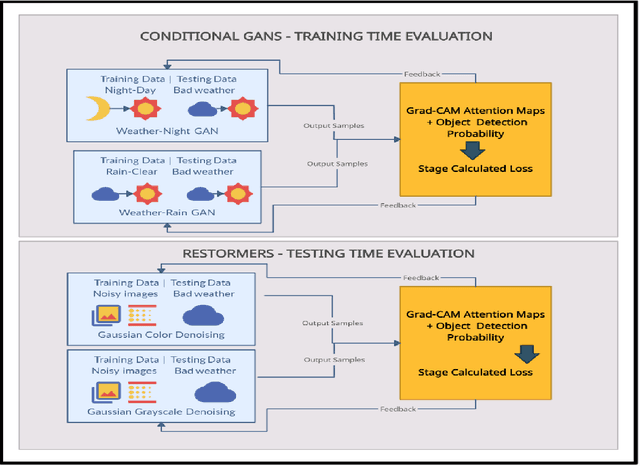
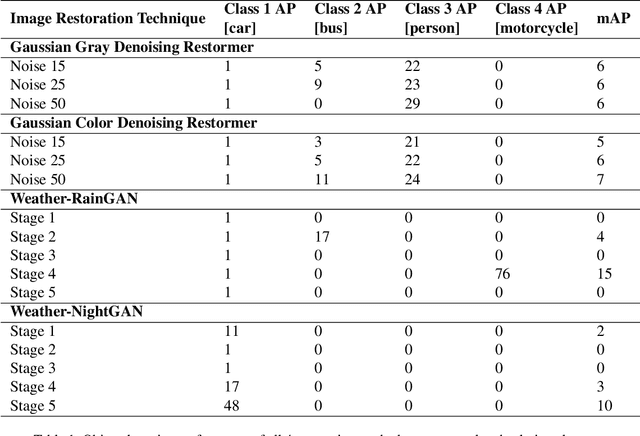
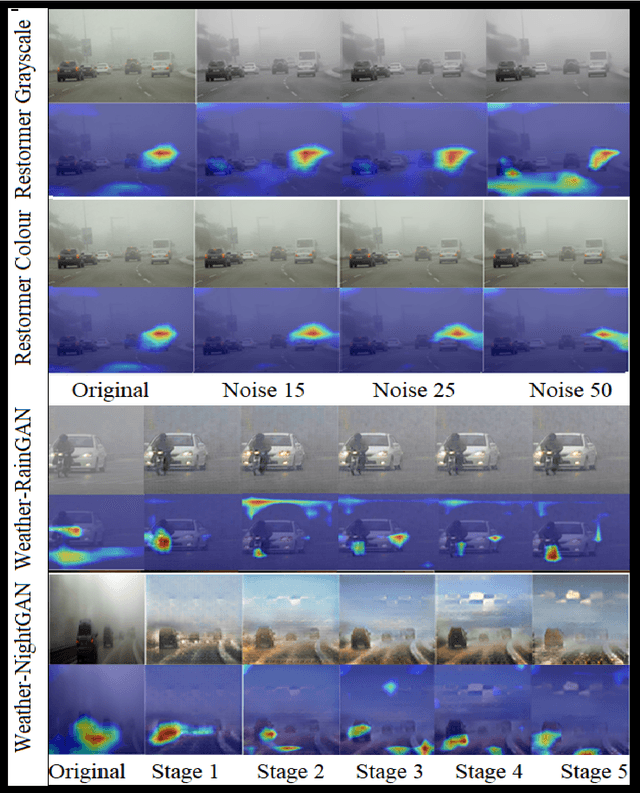
Modern applications such as self-driving cars and drones rely heavily upon robust object detection techniques. However, weather corruptions can hinder the object detectability and pose a serious threat to their navigation and reliability. Thus, there is a need for efficient denoising, deraining, and restoration techniques. Generative adversarial networks and transformers have been widely adopted for image restoration. However, the training of these methods is often unstable and time-consuming. Furthermore, when used for object detection (OD), the output images generated by these methods may provide unsatisfactory results despite image clarity. In this work, we propose a contrastive approach towards mitigating this problem, by evaluating images generated by restoration models during and post training. This approach leverages OD scores combined with attention maps for predicting the usefulness of restored images for the OD task. We conduct experiments using two novel use-cases of conditional GANs and two transformer methods that probe the robustness of the proposed approach on multi-weather corruptions in the OD task. Our approach achieves an averaged 178 percent increase in mAP between the input and restored images under adverse weather conditions like dust tornadoes and snowfall. We report unique cases where greater denoising does not improve OD performance and conversely where noisy generated images demonstrate good results. We conclude the need for explainability frameworks to bridge the gap between human and machine perception, especially in the context of robust object detection for autonomous vehicles.