Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResponsibility-Sensitive Safety: an Introduction with an Eye to Logical Foundations and Formalization
Paper and Code
Jun 07, 2022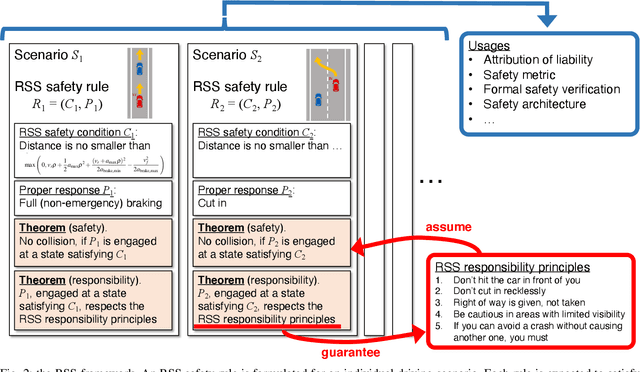
Responsibility-sensitive safety (RSS) is an approach to the safety of automated driving systems (ADS). It aims to introduce mathematically formulated safety rules, compliance with which guarantees collision avoidance as a mathematical theorem. However, despite the emphasis on mathematical and logical guarantees, the logical foundations and formalization of RSS are largely an unexplored topic of study. In this paper, we present an introduction to RSS, one that we expect will bridge between different research communities and pave the way to a logical theory of RSS, its mathematical formalization, and software tools of practical use.
* 10 pages
View paper on