 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResidual Attention Graph Convolutional Network for Geometric 3D Scene Classification
Paper and Code
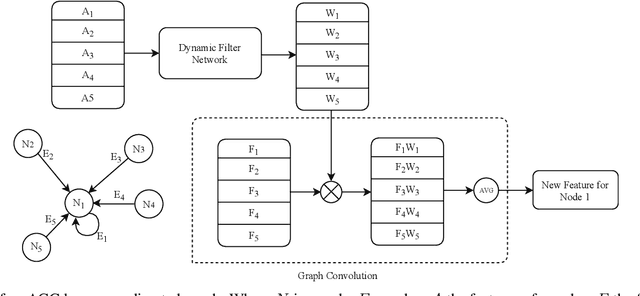


Geometric 3D scene classification is a very challenging task. Current methodologies extract the geometric information using only a depth channel provided by an RGB-D sensor. These kinds of methodologies introduce possible errors due to missing local geometric context in the depth channel. This work proposes a novel Residual Attention Graph Convolutional Network that exploits the intrinsic geometric context inside a 3D space without using any kind of point features, allowing the use of organized or unorganized 3D data. Experiments are done in NYU Depth v1 and SUN-RGBD datasets to study the different configurations and to demonstrate the effectiveness of the proposed method. Experimental results show that the proposed method outperforms current state-of-the-art in geometric 3D scene classification tasks.