 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReset band for mitigatation of quantization induced performance degradation
Paper and Code
Oct 30, 2020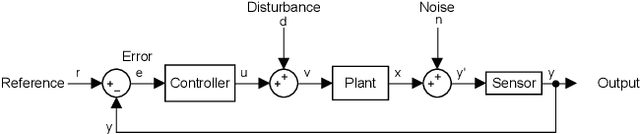


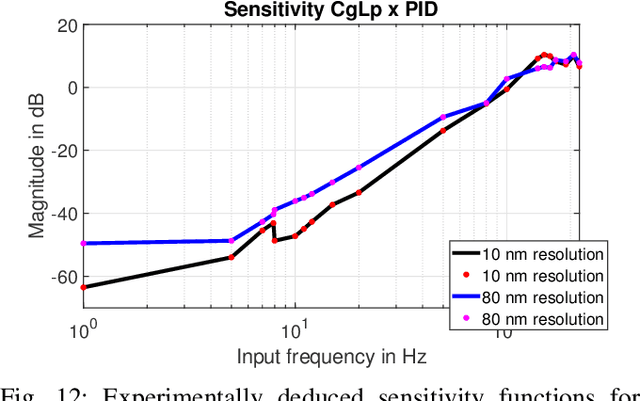
Reset control has emerged as a viable alternative to popular PID, capable of outperforming and overcoming the linear limitations. However, in motion control systems, quantization can cause severe performance degradation. This paper investigates this degradation in practical systems and re-purposes the reset band condition in order to mitigate the same. Numerical simulations have been conducted on a mass based positioning system to analyze the cause of the quantization induced performance degradation. Moreover, a performance and robustness analysis was performed with the proposed solution. Finally, novel tuning guidelines are provided for estimating the required reset band parameter. Additionally, practical experiments have been conducted on a high precision motion system for validation. The experiments show by example that the reset band can reduce the error in the problematic region by up to 285% and hence shows the need and effectiveness of the proposed solution.