 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeResearch on target detection method of distracted driving behavior based on improved YOLOv8
Paper and Code
Jul 02, 2024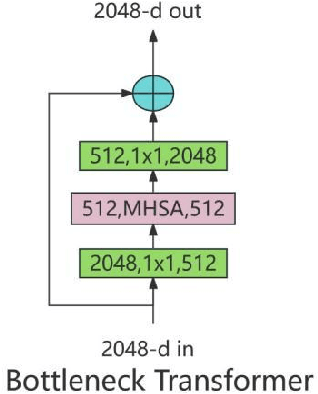
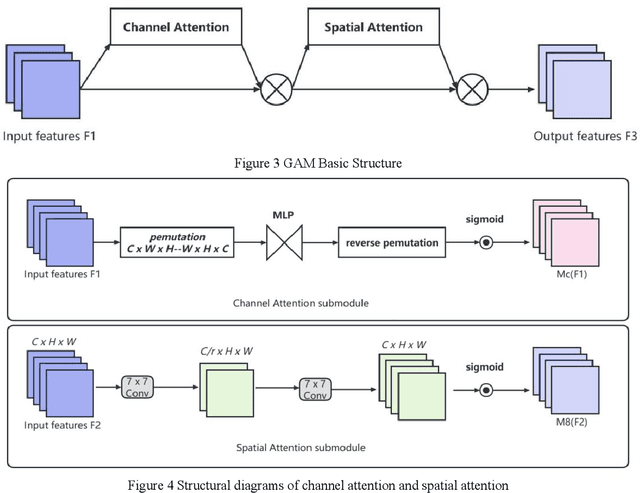
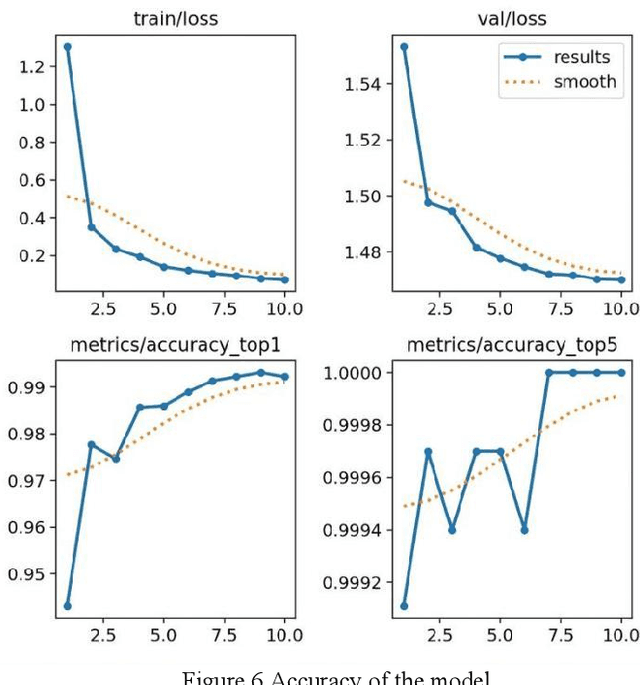
With the development of deep learning technology, the detection and classification of distracted driving behaviour requires higher accuracy. Existing deep learning-based methods are computationally intensive and parameter redundant, limiting the efficiency and accuracy in practical applications. To solve this problem, this study proposes an improved YOLOv8 detection method based on the original YOLOv8 model by integrating the BoTNet module, GAM attention mechanism and EIoU loss function. By optimising the feature extraction and multi-scale feature fusion strategies, the training and inference processes are simplified, and the detection accuracy and efficiency are significantly improved. Experimental results show that the improved model performs well in both detection speed and accuracy, with an accuracy rate of 99.4%, and the model is smaller and easy to deploy, which is able to identify and classify distracted driving behaviours in real time, provide timely warnings, and enhance driving safety.