 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRelative Transformation Estimation Based on Fusion of Odometry and UWB Ranging Data
Paper and Code
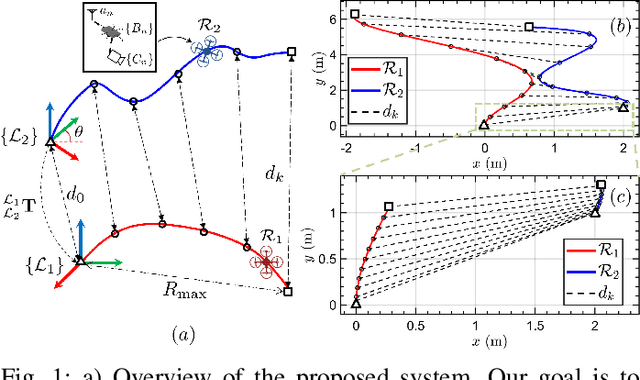
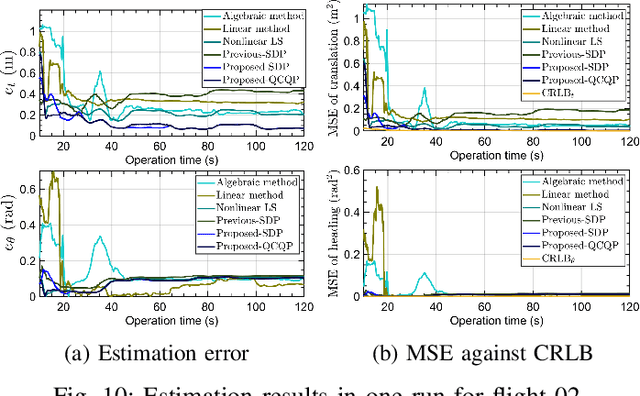
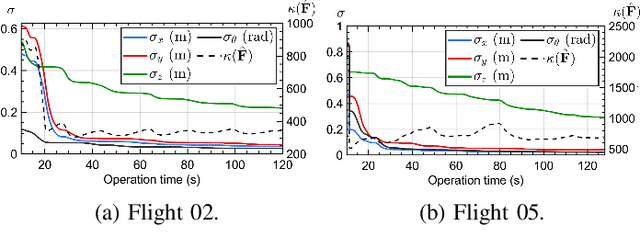
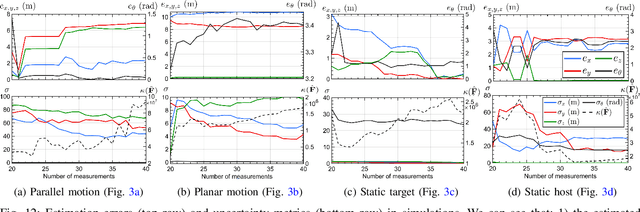
In this work, the problem of 4 degree-of-freedom (3D position and heading) robot-to-robot relative frame transformation estimation using onboard odometry and inter-robot distance measurements is studied. Firstly, we present a theoretical analysis of the problem, namely the derivation and interpretation of the Cramer-Rao Lower Bound (CRLB), the Fisher Information Matrix (FIM) and its determinant. Secondly, we propose optimization-based methods to solve the problem, including a quadratically constrained quadratic programming (QCQP) and the corresponding semidefinite programming (SDP) relaxation. Moreover, we address practical issues that are ignored in previous works, such as accounting for spatial-temporal offsets between the ultra-wideband (UWB) and odometry sensors, rejecting UWB outliers and checking for singular configurations before commencing operation. Lastly, extensive simulations and real-life experiments with aerial robots show that the proposed QCQP and SDP methods outperform state-of-the-art methods, especially in geometrically poor or large measurement noise conditions. In general, the QCQP method provides the best results at the expense of computational time, while the SDP method runs much faster and is sufficiently accurate in most cases.