 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement Learning by Value Gradients
Paper and Code
Mar 25, 2008


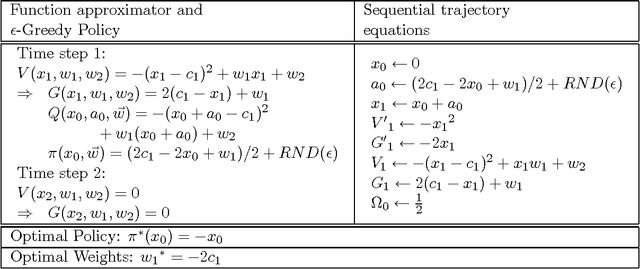
The concept of the value-gradient is introduced and developed in the context of reinforcement learning. It is shown that by learning the value-gradients exploration or stochastic behaviour is no longer needed to find locally optimal trajectories. This is the main motivation for using value-gradients, and it is argued that learning value-gradients is the actual objective of any value-function learning algorithm for control problems. It is also argued that learning value-gradients is significantly more efficient than learning just the values, and this argument is supported in experiments by efficiency gains of several orders of magnitude, in several problem domains. Once value-gradients are introduced into learning, several analyses become possible. For example, a surprising equivalence between a value-gradient learning algorithm and a policy-gradient learning algorithm is proven, and this provides a robust convergence proof for control problems using a value function with a general function approximator.