 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReinforcement learning and inverse reinforcement learning with system 1 and system 2
Paper and Code
Nov 19, 2018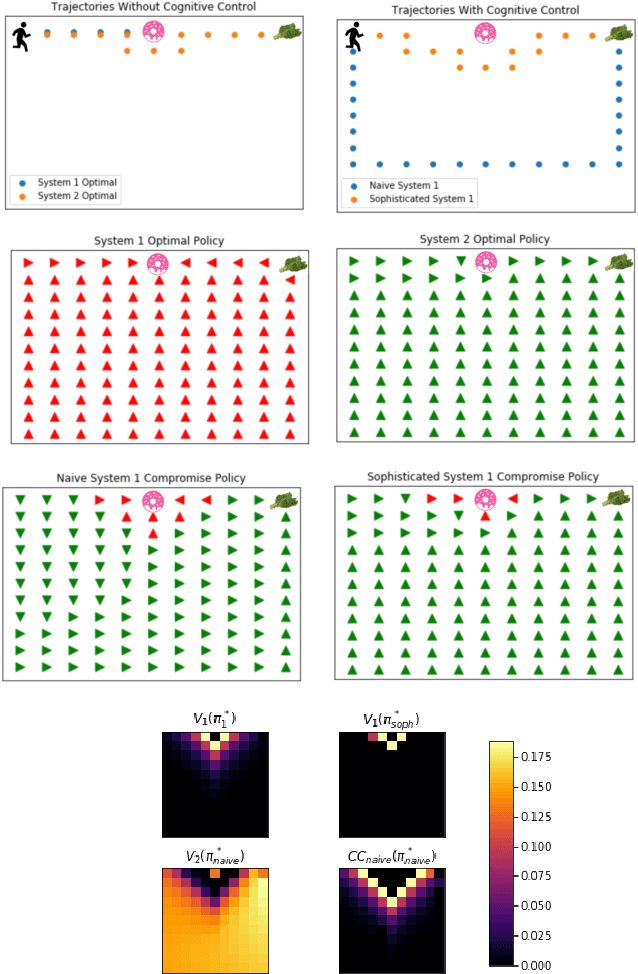

Inferring a person's goal from their behavior is an important problem in applications of AI (e.g. automated assistants, recommender systems). The workhorse model for this task is the rational actor model - this amounts to assuming that people have stable reward functions, discount the future exponentially, and construct optimal plans. Under the rational actor assumption techniques such as inverse reinforcement learning (IRL) can be used to infer a person's goals from their actions. A competing model is the dual-system model. Here decisions are the result of an interplay between a fast, automatic, heuristic-based system 1 and a slower, deliberate, calculating system 2. We generalize the dual system framework to the case of Markov decision problems and show how to compute optimal plans for dual-system agents. We show that dual-system agents exhibit behaviors that are incompatible with rational actor assumption. We show that naive applications of rational-actor IRL to the behavior of dual-system agents can generate wrong inference about the agents' goals and suggest interventions that actually reduce the agent's overall utility. Finally, we adapt a simple IRL algorithm to correctly infer the goals of dual system decision-makers. This allows us to make interventions that help, rather than hinder, the dual-system agent's ability to reach their true goals.