 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRegret-optimal control in dynamic environments
Paper and Code
Oct 20, 2020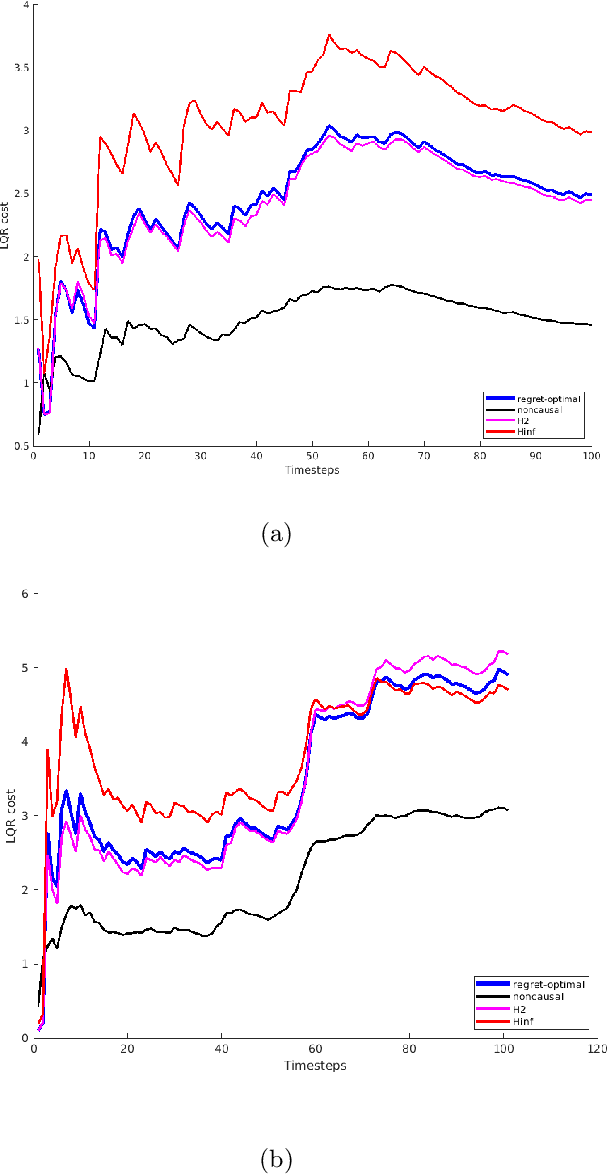
We consider the control of linear time-varying dynamical systems from the perspective of regret minimization. Unlike most prior work in this area, we focus on the problem of designing an online controller which competes with the best dynamic sequence of control actions selected in hindsight, instead of the best controller in some specific class of controllers. This formulation is attractive when the environment changes over time and no single controller achieves good performance over the entire time horizon. We derive the structure of the regret-optimal online controller via a novel reduction to $H_{\infty}$ control and present a clean data-dependent bound on its regret. We also present numerical simulations which confirm that our regret-optimal controller significantly outperforms the $H_2$ and $H_{\infty}$ controllers in dynamic environments.