 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRegret Bounds for Thompson Sampling in Restless Bandit Problems
Paper and Code
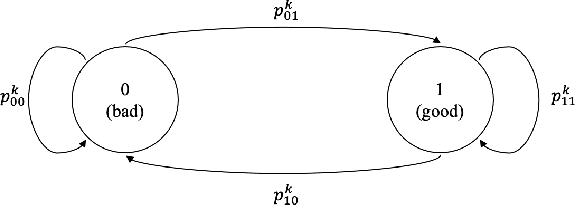

Restless bandit problems are instances of non-stationary multi-armed bandits. These problems have been studied well from the optimization perspective, where we aim to efficiently find a near-optimal policy when system parameters are known. However, very few papers adopt a learning perspective, where the parameters are unknown. In this paper, we analyze the performance of Thompson sampling in restless bandits with unknown parameters. We consider a general policy map to define our competitor and prove an $\tilde{O}(\sqrt{T})$ Bayesian regret bound. Our competitor is flexible enough to represent various benchmarks including the best fixed action policy, the optimal policy, the Whittle index policy, or the myopic policy. We also present empirical results that support our theoretical findings.