 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRecurrent neural network-based Internal Model Control of unknown nonlinear stable systems
Paper and Code
Aug 10, 2021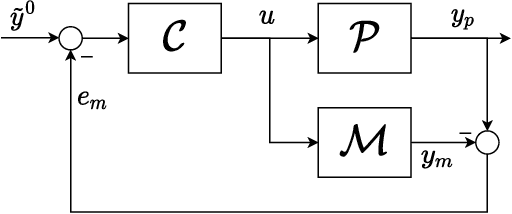



Owing to their superior modeling capabilities, gated Recurrent Neural Networks (RNNs), such as Gated Recurrent Units (GRUs) and Long Short-Term Memory networks (LSTMs), have become popular tools for learning dynamical systems. This paper aims to discuss how these networks can be adopted for the synthesis of Internal Model Control (IMC) architectures. To this end, a first gated RNN is used to learn a model of the unknown input-output stable plant. Then, another gated RNN approximating the model inverse is trained. The proposed scheme is able to cope with the saturation of the control variables, and it can be deployed on low-power embedded controllers since it does not require any online computation. The approach is then tested on the Quadruple Tank benchmark system, resulting in satisfactory closed-loop performances.