 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRecognising Known Configurations of Garments For Dual-Arm Robotic Flattening
Paper and Code
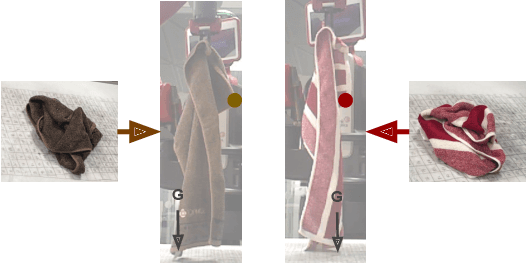

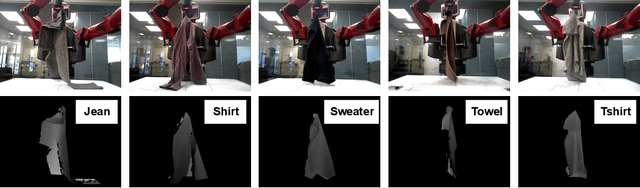
Robotic deformable-object manipulation is a challenge in the robotic industry because deformable objects have complicated and various object states. Predicting those object states and updating manipulation planning are time-consuming and computationally expensive. In this paper, we propose an effective robotic manipulation approach for recognising 'known configurations' of garments with a 'Known Configuration neural Network' (KCNet) and choosing pre-designed manipulation plans based on the recognised known configurations. Our robotic manipulation plan features a four-action strategy: finding two critical grasping points, stretching the garments, and lifting down the garments. We demonstrate that our approach only needs 98 seconds on average to flatten garments of five categories.