 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRechargeable UAV Trajectory Optimization for Real-Time Persistent Data Collection of Large-Scale Sensor Networks
Paper and Code
Apr 24, 2024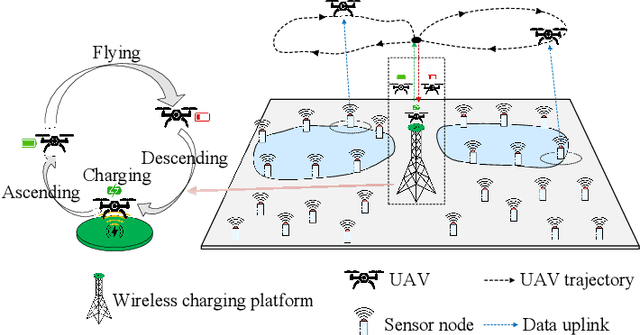



Continuous real-time data collection in wireless sensor networks is crucial for facilitating timely decision-making and environmental monitoring. Unmanned aerial vehicles (UAVs) have received plenty of attention for collecting data efficiently due to their high flexibility and enhanced communication ability, nonetheless, the limited onboard energy restricts UAVs' application on persistent missions, such as disaster search and rescue. In this paper, we propose a rechargeable UAV-assisted periodic data collection scheme, where the UAV replenishes energy through the wireless charging platform during the mission to provide persistent information services for the sensor nodes (SNs). Specifically, the total completion time is minimized by optimizing the trajectory of the UAV to reach the balance among the collecting time, flight time, and recharging time. However, optimally solving this problem is highly non-trivial due to the non-convex constraints and the involved integer variables. To address this issue, the formulated problem is decomposed into two subproblems, namely, UAV data collection trajectory optimization and SN clustering and UAV visiting order optimization. By exploiting the convex optimization techniques and proving the total time is non-decreasing with the cluster number, a periodic trajectory optimization algorithm based on successive convex approximation (SCA) and bisection search is proposed to solve the main problem. The simulation results show the efficiency of the proposed scheme in practical scenarios and the completion time of the proposed algorithm is on average 39% and 33% lower than the two benchmarks, respectively.