Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time texturing for 6D object instance detection from RGB Images
Paper and Code
Dec 13, 2019
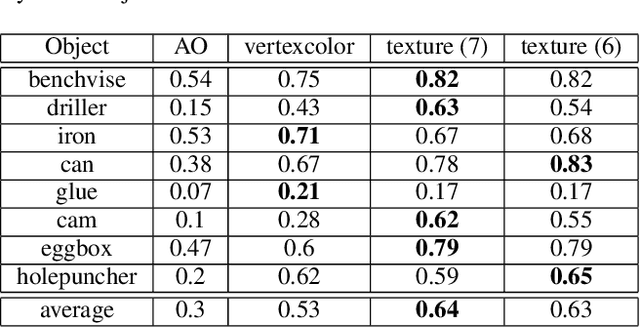
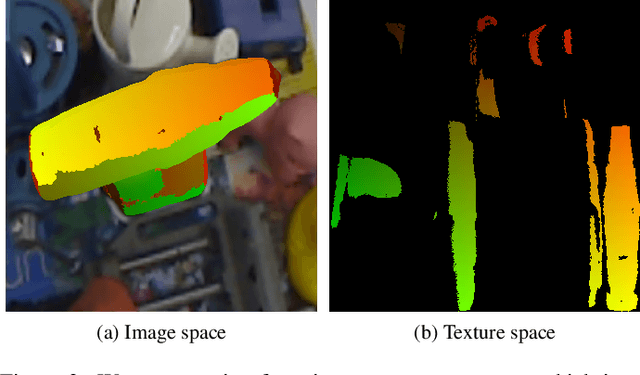
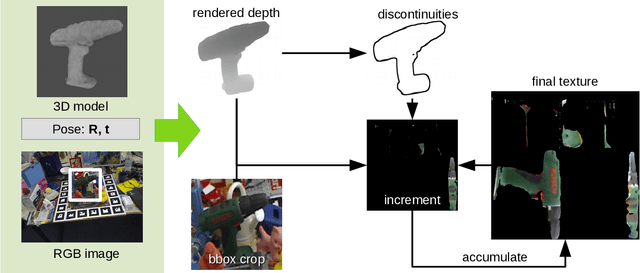
For objected detection, the availability of color cues strongly influences detection rates and is even a prerequisite for many methods. However, when training on synthetic CAD data, this information is not available. We therefore present a method for generating a texture-map from image sequences in real-time. The method relies on 6 degree-of-freedom poses and a 3D-model being available. In contrast to previous works this allows interleaving detection and texturing for upgrading the detector on-the-fly. Our evaluation shows that the acquired texture-map significantly improves detection rates using the LINEMOD detector on RGB images only. Additionally, we use the texture-map to differentiate instances of the same object by surface color.
View paper on