 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Structure Flow
Paper and Code
Jun 26, 2024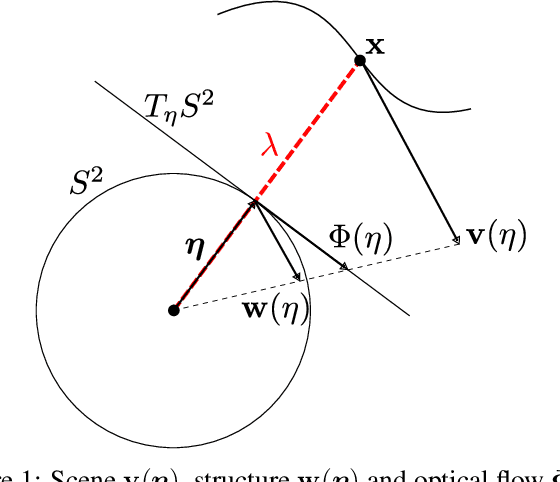
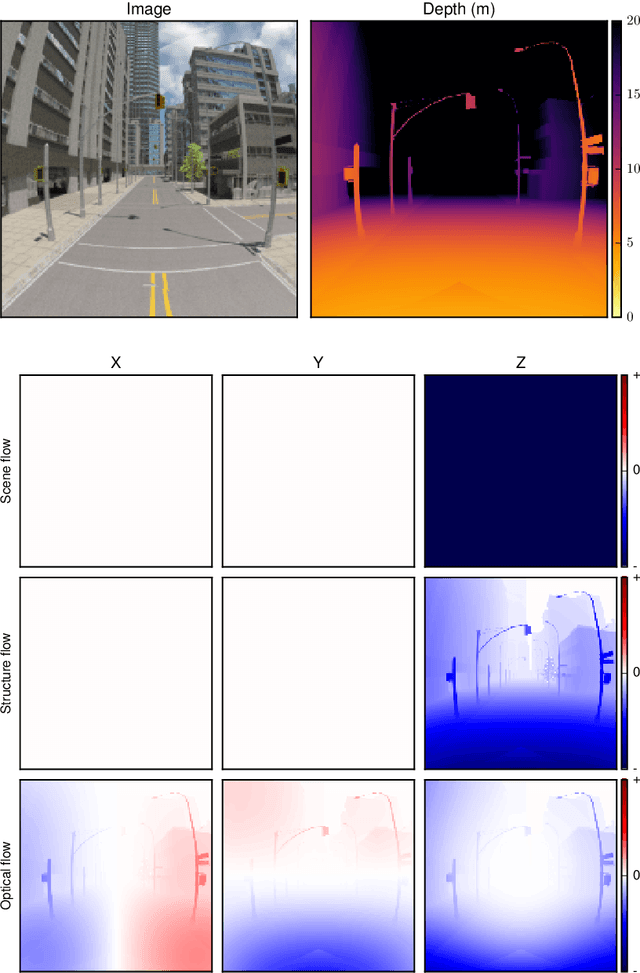
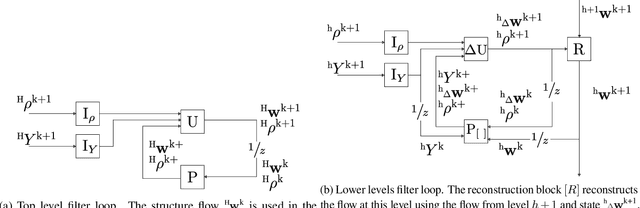

This article introduces the structure flow field; a flow field that can provide high-speed robo-centric motion information for motion control of highly dynamic robotic devices and autonomous vehicles. Structure flow is the angular 3D velocity of the scene at a given pixel. We show that structure flow posses an elegant evolution model in the form of a Partial Differential Equation (PDE) that enables us to create dense flow predictions forward in time. We exploit this structure to design a predictor-update algorithm to compute structure flow in real time using image and depth measurements. The prediction stage takes the previous estimate of the structure flow and propagates it forward in time using a numerical implementation of the structure flow PDE. The predicted flow is then updated using new image and depth data. The algorithm runs up to 600 Hz on a Desktop GPU machine for 512x512 images with flow values up to 8 pixels. We provide ground truth validation on high-speed synthetic image sequences as well as results on real-life video on driving scenarios.