 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Sampling-based Model Predictive Control based on Reverse Kullback-Leibler Divergence and Its Adaptive Acceleration
Paper and Code
Dec 08, 2022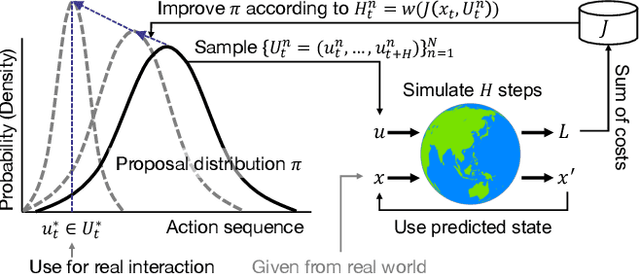



Sampling-based model predictive control (MPC) can be applied to versatile robotic systems. However, the real-time control with it is a big challenge due to its unstable updates and poor convergence. This paper tackles this challenge with a novel derivation from reverse Kullback-Leibler divergence, which has a mode-seeking behavior and is likely to find one of the sub-optimal solutions early. With this derivation, a weighted maximum likelihood estimation with positive/negative weights is obtained, solving by mirror descent (MD) algorithm. While the negative weights eliminate unnecessary actions, that requires to develop a practical implementation that avoids the interference with positive/negative updates based on rejection sampling. In addition, although the convergence of MD can be accelerated with Nesterov's acceleration method, it is modified for the proposed MPC with a heuristic of a step size adaptive to the noise estimated in update amounts. In the real-time simulations, the proposed method can solve more tasks statistically than the conventional method and accomplish more complex tasks only with a CPU due to the improved acceleration. In addition, its applicability is also demonstrated in a variable impedance control of a force-driven mobile robot. https://youtu.be/D8bFMzct1XM