 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time Monocular Depth Estimation with Sparse Supervision on Mobile
Paper and Code
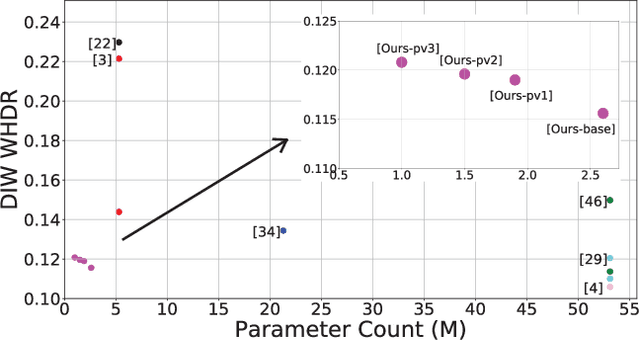
Monocular (relative or metric) depth estimation is a critical task for various applications, such as autonomous vehicles, augmented reality and image editing. In recent years, with the increasing availability of mobile devices, accurate and mobile-friendly depth models have gained importance. Increasingly accurate models typically require more computational resources, which inhibits the use of such models on mobile devices. The mobile use case is arguably the most unrestricted one, which requires highly accurate yet mobile-friendly architectures. Therefore, we try to answer the following question: How can we improve a model without adding further complexity (i.e. parameters)? Towards this end, we systematically explore the design space of a relative depth estimation model from various dimensions and we show, with key design choices and ablation studies, even an existing architecture can reach highly competitive performance to the state of the art, with a fraction of the complexity. Our study spans an in-depth backbone model selection process, knowledge distillation, intermediate predictions, model pruning and loss rebalancing. We show that our model, using only DIW as the supervisory dataset, achieves 0.1156 WHDR on DIW with 2.6M parameters and reaches 37 FPS on a mobile GPU, without pruning or hardware-specific optimization. A pruned version of our model achieves 0.1208 WHDR on DIW with 1M parameters and reaches 44 FPS on a mobile GPU.