 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-time End-to-End Federated Learning: An Automotive Case Study
Paper and Code
Mar 22, 2021
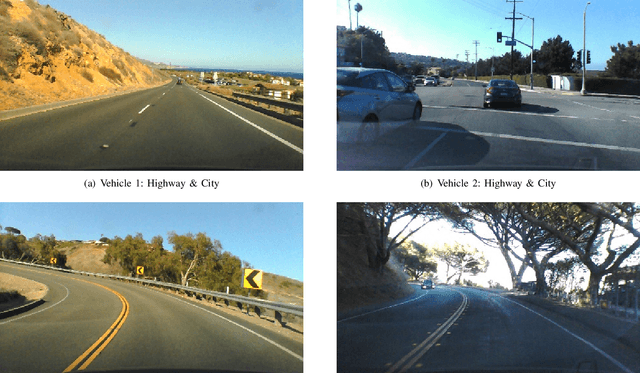

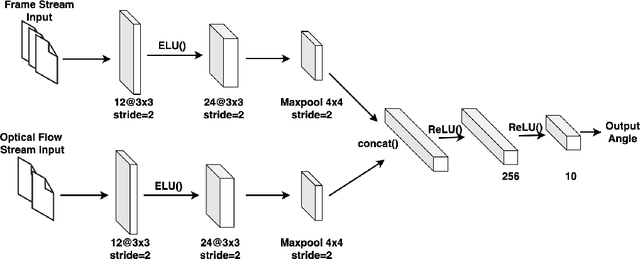
With the development and the increasing interests in ML/DL fields, companies are eager to utilize these methods to improve their service quality and user experience. Federated Learning has been introduced as an efficient model training approach to distribute and speed up time-consuming model training and preserve user data privacy. However, common Federated Learning methods apply a synchronized protocol to perform model aggregation, which turns out to be inflexible and unable to adapt to rapidly evolving environments and heterogeneous hardware settings in real-world systems. In this paper, we introduce an approach to real-time end-to-end Federated Learning combined with a novel asynchronous model aggregation protocol. We validate our approach in an industrial use case in the automotive domain focusing on steering wheel angle prediction for autonomous driving. Our results show that asynchronous Federated Learning can significantly improve the prediction performance of local edge models and reach the same accuracy level as the centralized machine learning method. Moreover, the approach can reduce the communication overhead, accelerate model training speed and consume real-time streaming data by utilizing a sliding training window, which proves high efficiency when deploying ML/DL components to heterogeneous real-world embedded systems.