 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReactive Whole-Body Obstacle Avoidance for Collision-Free Human-Robot Interaction with Topological Manifold Learning
Paper and Code
Mar 24, 2022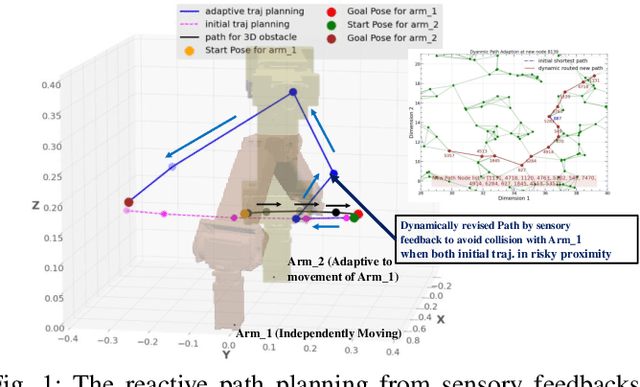

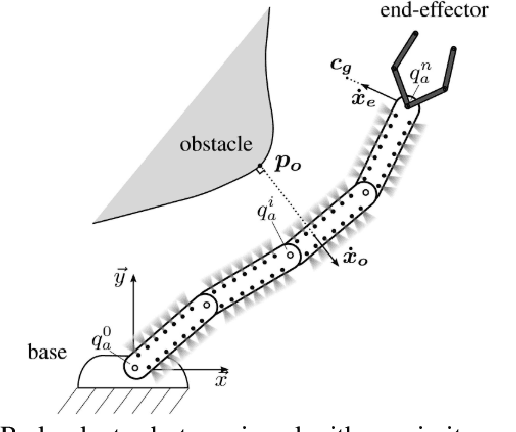

Safe collaboration between human and robots in a common unstructured environment becomes increasingly critical with the emergence of Industry 4.0. However, to accomplish safe, robust, and autonomous collaboration with humans, modern robotic systems must possess not only effective proximity perception but also reactive obstacle avoidance. Unfortunately, for most robotic systems, their shared working environment with human operators may not always be static, instead often dynamically varying and being constantly cluttered with unanticipated obstacles or hazards. In this paper, we present a novel methodology of reactive whole-body obstacle avoidance methodology that safeguards the human who enters the robot's workspace through achieving conflict-free human-robot interactions even in a dynamically constrained environment. Unlike existing Jacobian-type or geometric approaches, our proposed methodology leverages both topological manifold learning and latest deep learning advances, therefore can not only be readily generalized into other unseen problem settings, but also achieve high computing efficiency with concrete theoretical basis. Furthermore, in sharp contrast to the industrial cobot setting, our methodology allows a robotic arm to proactively avoid obstacles of arbitrary 3D shapes without direct contacting. To solidify our study, we implement and validate our methodology with a robotic platform consisting of dual 6-DoF robotic arms with optimized proximity sensor placement, both of which are capable of working collaboratively with different levels of interference. Specifically, one arm will perform reactive whole-body obstacle avoidance while achieving its pre-determined objective, with the other arm emulating the presence of a human collaborator with independent and potentially adversary movements.