 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRapid Integrator for a Class of Multi-Contact Systems
Paper and Code
Feb 01, 2024


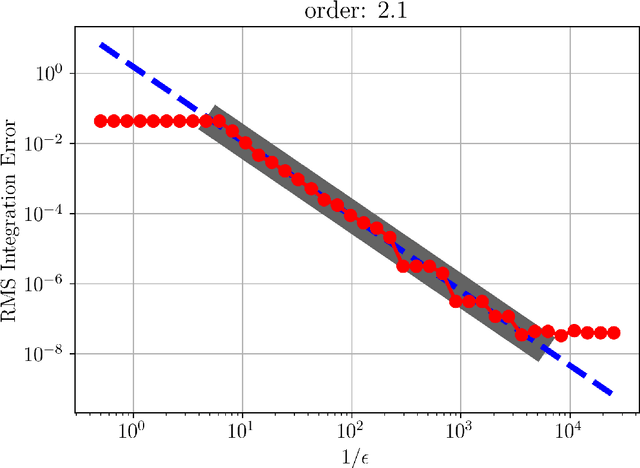
Many problems in robotics involve creating or breaking multiple contacts nearly simultaneously or in an indeterminate order. We present a novel general purpose numerical integrator based on the theory of Event Selected Systems (ESS). Many multicontact models are ESS, which has recently been shown to imply that despite a discontinuous vector field, the flow of these systems is continuous, piecewise smooth, and has a well defined orbital derivative for all trajectories, which can be rapidly computed. We provide an elementary proof that our integrator is first-order accurate and verify numerically that it is in fact second-order accurate as its construction anticipated. We also compare our integrator, implemented in NumPy, to a MuJoCo simulation on models with 2 to 100 contacts, and confirm that the increase in simulation time per contact is nearly identical. The results suggest that this novel integrator can be invaluable for modelling and control in many robotics applications.