 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRAIL: Robust Acoustic Indoor Localization for Drones
Paper and Code
Nov 06, 2021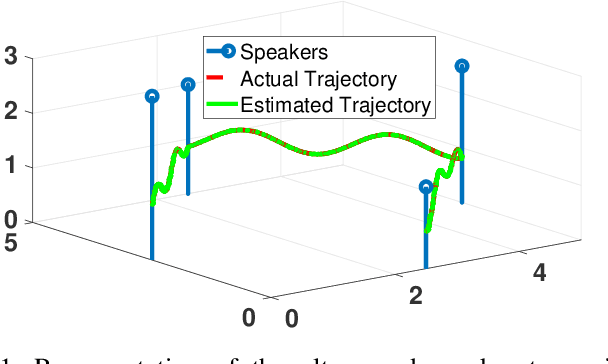
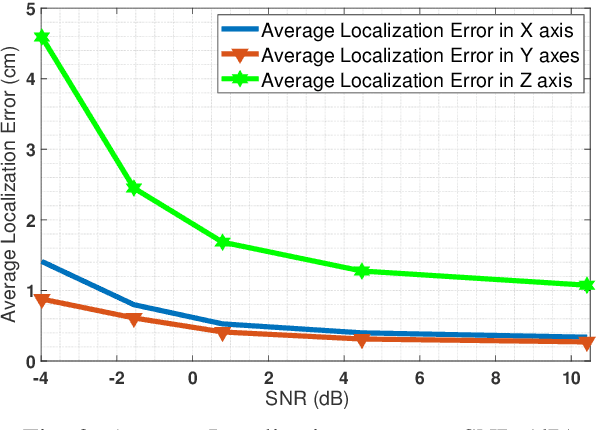
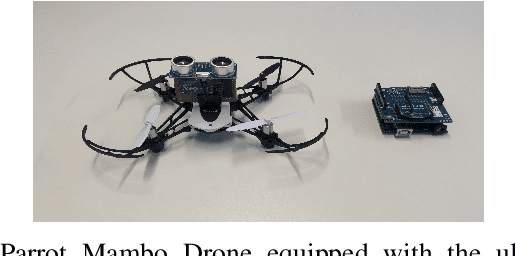
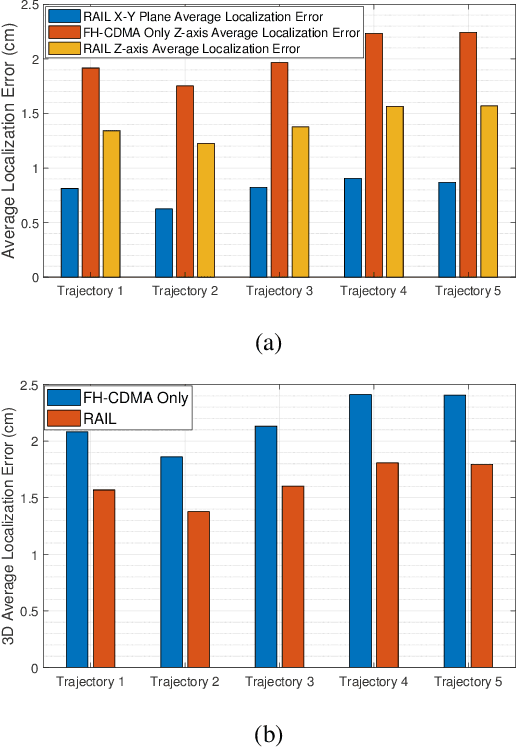
Navigating in environments where the GPS signal is unavailable, weak, purposefully blocked, or spoofed has become crucial for a wide range of applications. A prime example is autonomous navigation for drones in indoor environments: to fly fully or partially autonomously, drones demand accurate and frequent updates of their locations. This paper proposes a Robust Acoustic Indoor Localization (RAIL) scheme for drones designed explicitly for GPS-denied environments. Instead of depending on GPS, RAIL leverages ultrasonic acoustic signals to achieve precise localization using a novel hybrid Frequency Hopping Code Division Multiple Access (FH-CDMA) technique. Contrary to previous approaches, RAIL is able to both overcome the multi-path fading effect and provide precise signal separation in the receiver. Comprehensive simulations and experiments using a prototype implementation demonstrate that RAIL provides high-accuracy three-dimensional localization with an average error of less than $1.5$~cm.